RoboDK Plugin for Mastercam
简介
在Mastercam中使用RoboDK插件,可帮助用户直接在Mastercam软件快速搭建机器人加工项目,实现工业机器人离线编程与仿真。该插件将Mastercam的加工编程能力与RoboDK的机器人运动模拟功能无缝结合,支持生成无误差的机器人加工程序。
除了插件,用户可以直接在Mastercam中生成用于机器人加工程序。此外,RoboDK 还兼容以下文件格式: NCI(本地预处理 Mastercam 文件)、标准 APT/CLS 和 G 代码文件。
更多机器人加工相关功能详见RoboDK官方文档的机器人加工章节。
Video:这个视频介绍了Mastercam的RoboDK插件:https://www.youtube.com/watch?v=wdpQ76OGS5I。本文档介绍如何为 Mastercam 安装插件,以及如何使用 Mastercam 工具栏在 RoboDK 中设置机器人加工项目。
Tip:阅读以下文章,更好地了解数控机床和机器加工机器人的区别:https://robodk.com/blog/robot-machining-vs-cnc/ 。
安装插件
若在安装Mastercam后安装RoboDK,插件通常会自动集成到Mastercam的CHOOKS文件夹中(包含DLL文件、RoboDK.pst后处理器、铣床/路由机定义及默认配置)。
Note:若未显示RoboDK功能菜单,需按以下步骤手动安装插件。
安装步骤:
1.启动 Mastercam。
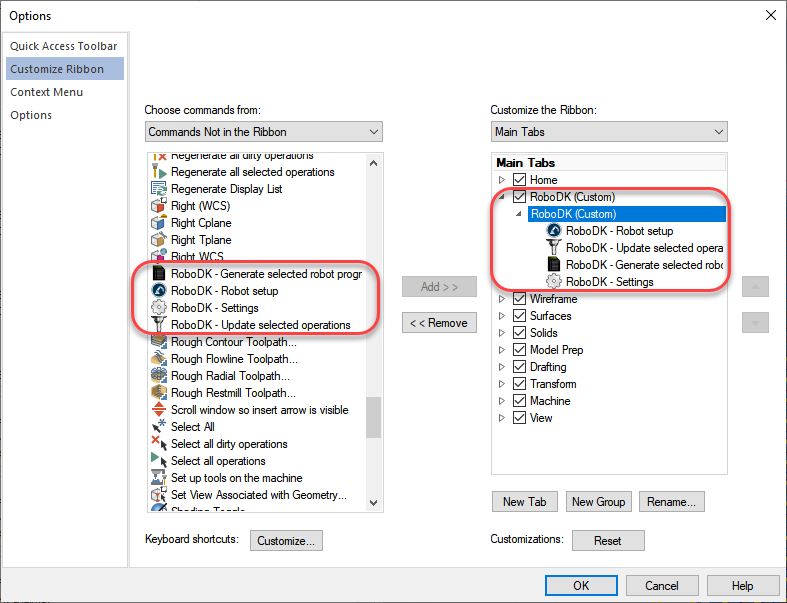
2.添加RoboDK工具栏:
a.选择File➔ Options
b.选择Customize Ribbon
c.选择New Tab
d.选择重命名,然后输入RoboDK
e.Add所选命令,如图所示
f.点击 "OK "保存新选项卡
完成后,Mastercam界面将显示RoboDK专属标签页
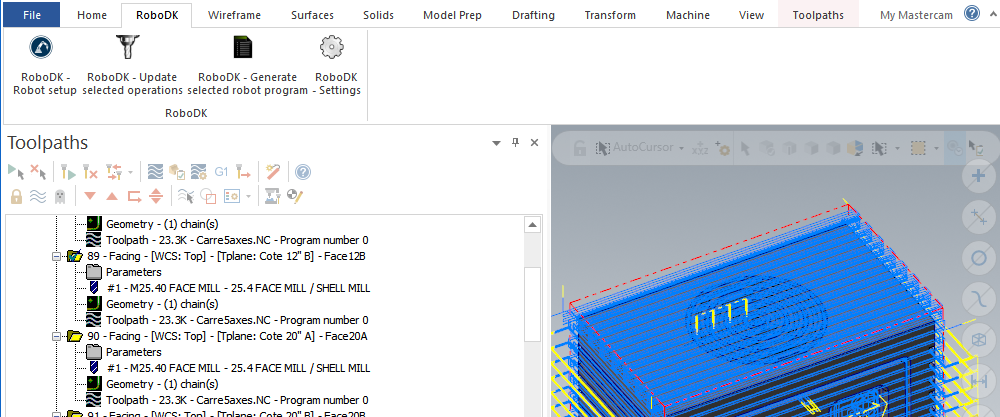
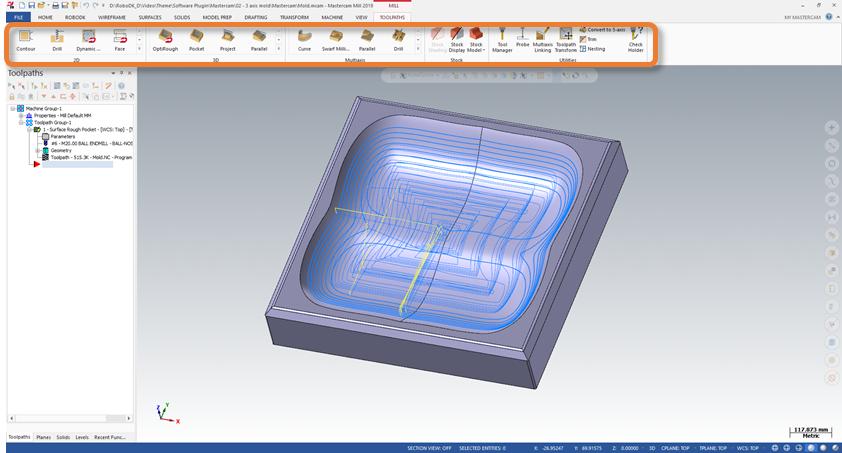
插件工具栏
打开Mastercam软件后,你会看到一个RoboDK工具栏选项卡。选择 RoboDK 选项卡,即可看到在 RoboDK 中设置机器人加工项目的可用选项。
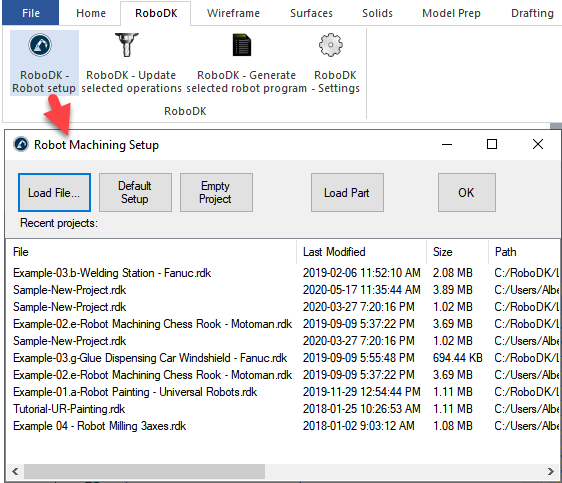
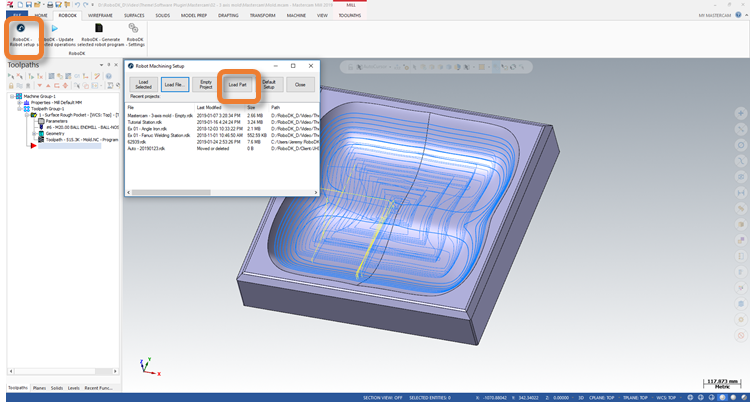
Robot setup
Robot Setup
●Load File.....:选择RoboDK工程文件(.rdk)。
●Default Setup:自动创建包含机器人、主轴(TCP工具)和参考坐标系的新项目,并导出Mastercam中的零件模型。
●Empty Project:手动搭建工作站(详见入门指南)。
●Load Part:将Mastercam中的可见实体/曲面以STL格式导入RoboDK。
更多有关构建新装置部分详见机器人加工章节。
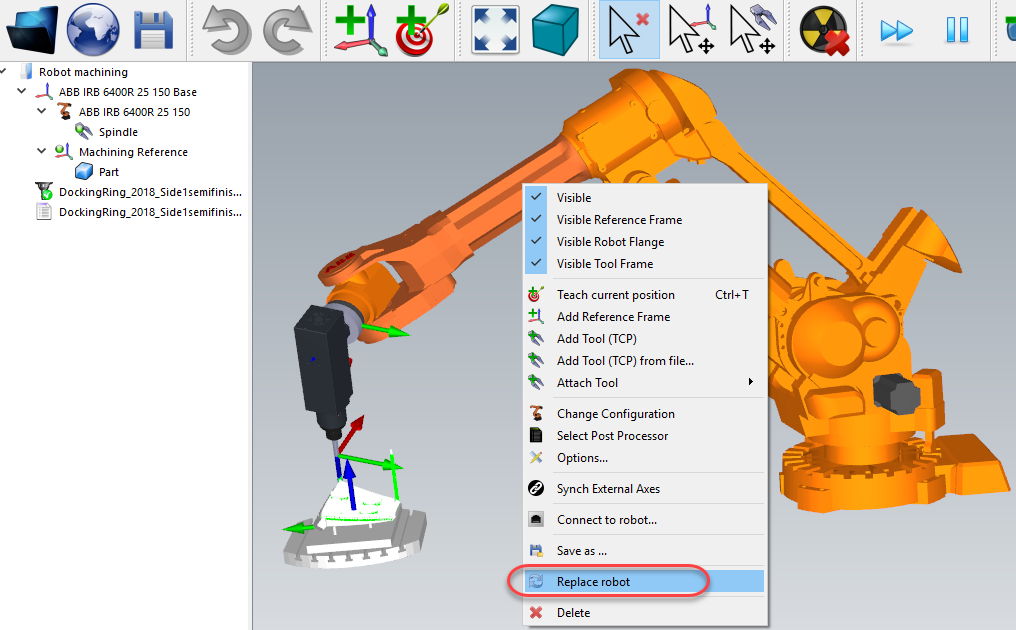
你还可以更换机器人、修改工具和/或参考坐标系。例如,请按照以下步骤更换机器人:
1.右键点击机器人
2.选择替换机器人(如图所示)
3.选择新机器人
RoboDK 安装程序默认只提供几个机器人,不过,可以从在线资源库下载其他机器人。
更多有关添加机器人工具的信息详见入门指南。
Tip:按住 Alt 拖动参考系或机器人(调整位置)。这对于在工作站内移动机器人或定位/设定机器人前方的部件非常有用。
按住 Alt+Shift 移动工具(TCP)。这对于在示教目标前设置机器人的位姿非常有用。
选择文件➔ 保存工作站 (Ctrl+S),完成保存项目。
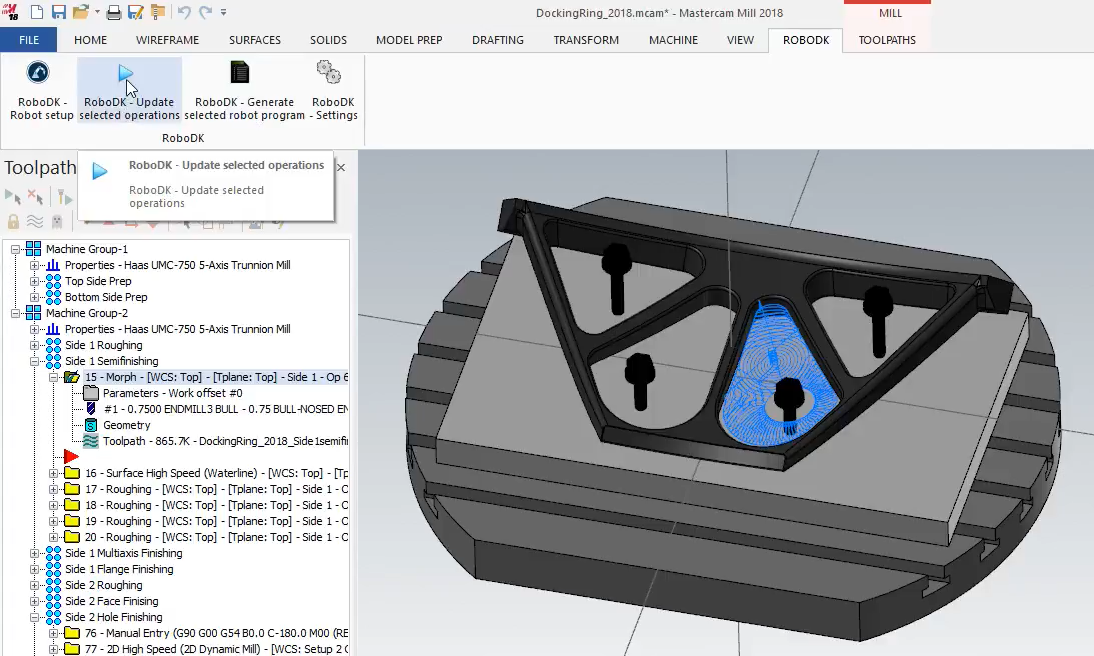
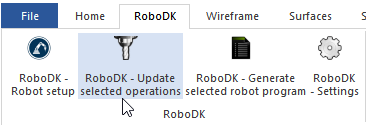
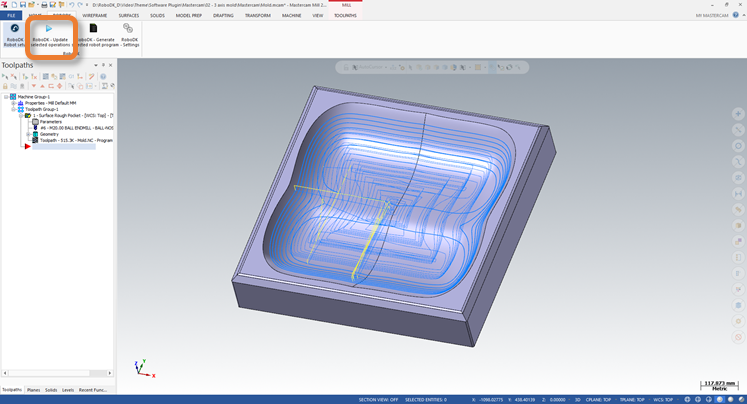
Update selected operations
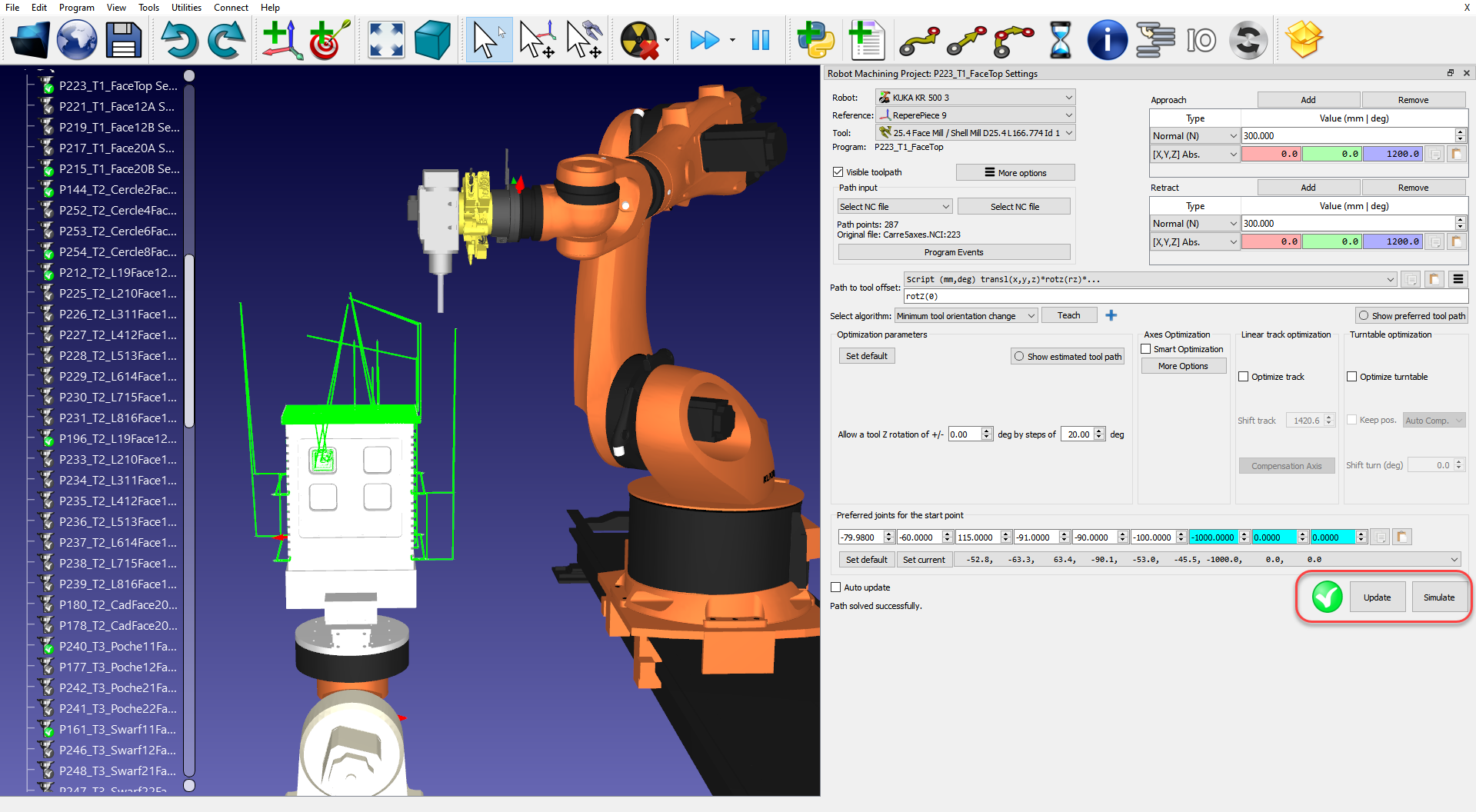
选择 Update selected operations,RoboDK会生成刀具路径并模拟加工过程。
此操作将在 RoboDK 中加载所选刀具路径,用于机器加工。默认情况下,每个加工操作都将被拆分为单独的机器人程序。
如果程序对所选机器人可行,则会显示绿色对号。如果存在任何问题(如奇异点、轴限制或到达问题),则会显示红色标记,并附带问题信息。
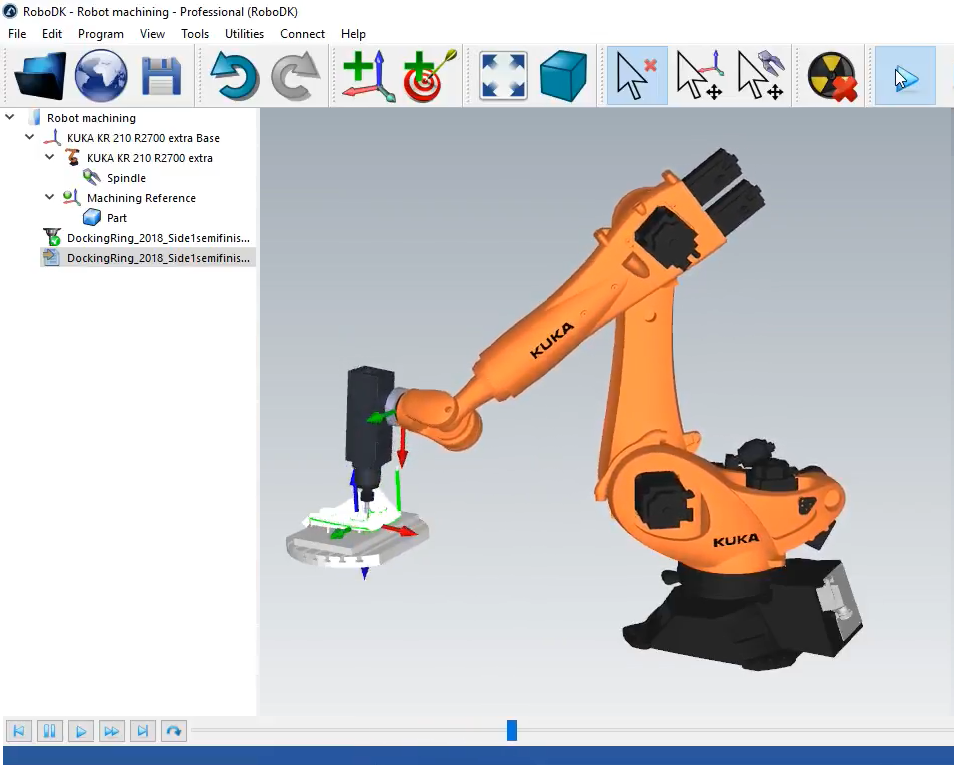
双击机器人加工项目
右键点击程序,选择运行,即可对其进行仿真(或双击程序)。你也可以选择生成机器人程序(F6),获取需要加载到机器人控制器上的机器人程序。更多有关如何生成机器人程序的信息详见离线编程章节。
如果需要,右键点击程序,选择选择后处理器程序来更改后处理器。这一步可以帮助你自定义生成代码的外观。更多有关选择和自定义后处理器的信息详见后处理器章节。
例如,当你使用库卡(Kuka)机器人时,RoboDK 生成器会自动使用 KRC2 机器人的后处理器(称为 KUKA KRC2),但是,如果你使用的是 KRC4,则可以选择 KUKA KRC4 后处理器。
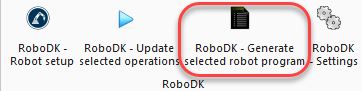
Generate selected robot program
点击 Generate Selected Robot Program
除非出现程序问题,否则不会显示 RoboDK。即使 RoboDK 没有运行,也可以使用该选项,在这种情况下,RoboDK 将在后台运行。
Note:Generate Selected Robot Program适用于快速更新代码(如微小编辑)。常规操作建议使用 Update Operation 确保完整性
修改程序保存路径:
1.在RoboDK中点击工具-选项
2.选择程序选项卡
3.选择机器人程序文件夹旁的设置
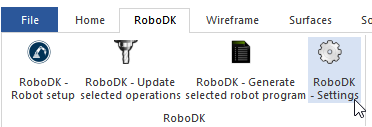
Settings
选择 RoboDK Settings
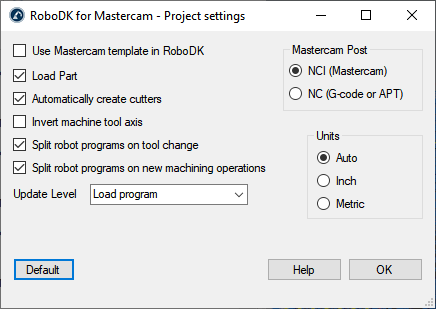
除其他外,你还可以修改以下选项:
1.Use the Mastercam template in RoboDK:启用后,RoboDK的3D视图风格与Mastercam保持一致(需要在RoboDK中按照以下路径取消勾选:工具➔选项➔其他➔忽略来自第三方应用程序的更改设置)。
2.Load Part:每次生成新操作时同步Mastercam中的可见模型。
3.Automatically create tool cutters:根据机器人首工具(Tool Holder)和TCP长度生成刀具。
4.Invert machine tool axis:适配刀具Z轴朝内(默认朝外)的特殊机床。
5.Mastercam Post:
a.NCI文件(推荐):直接解析Mastercam原生路径
b.NC文件(G代码/APT):支持解析钻孔循环等长格式代码。
范例
下文将分别展示三轴机器加工范例和五轴机器人切割范例。
3轴机器人加工
本示例展示了如何用插件创建一个三轴机器人加工项目。
Video:该视频展示了本章节指南的操作内容: https://www.youtube.com/watch?v=tArHbCS2HK8。
1.在 Mastercam 中加载零件。
2.在Mastercam 铣削工具创建刀具路径。
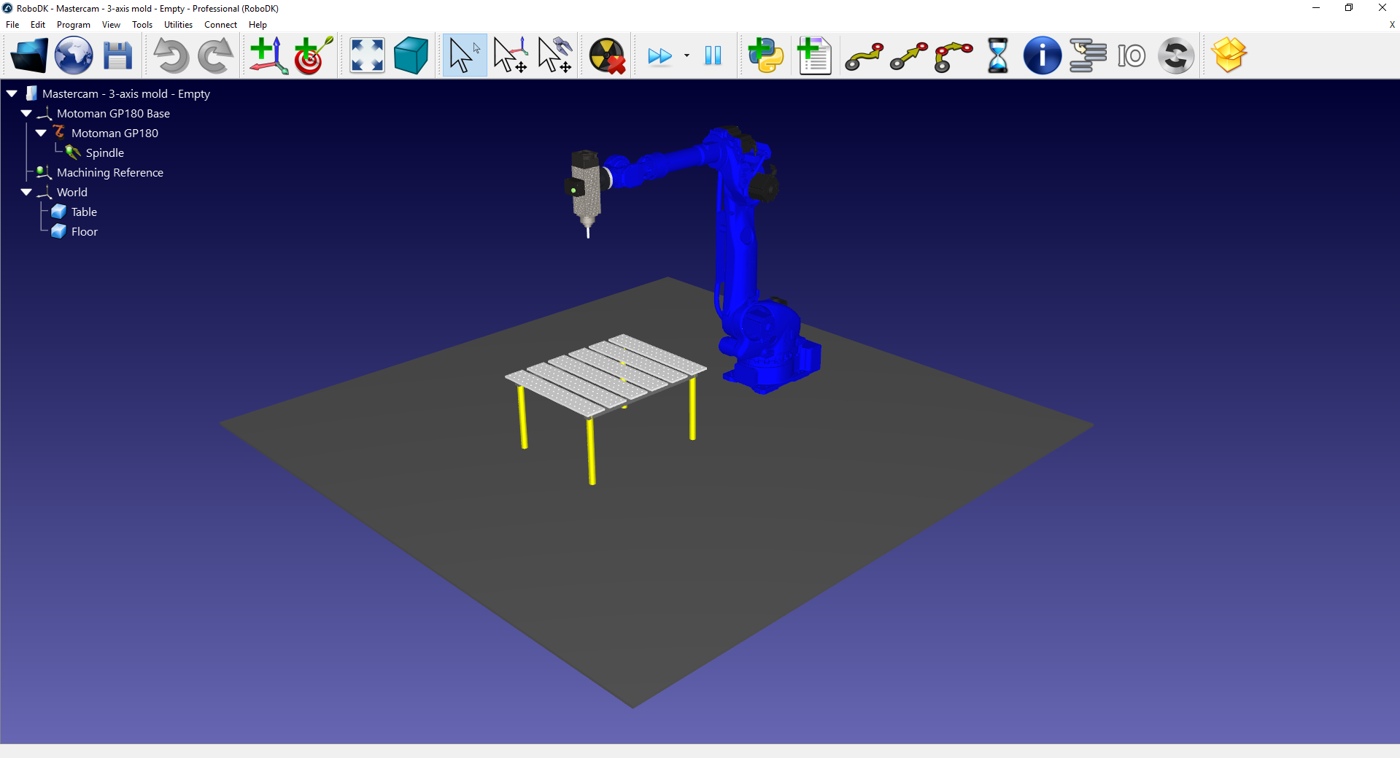
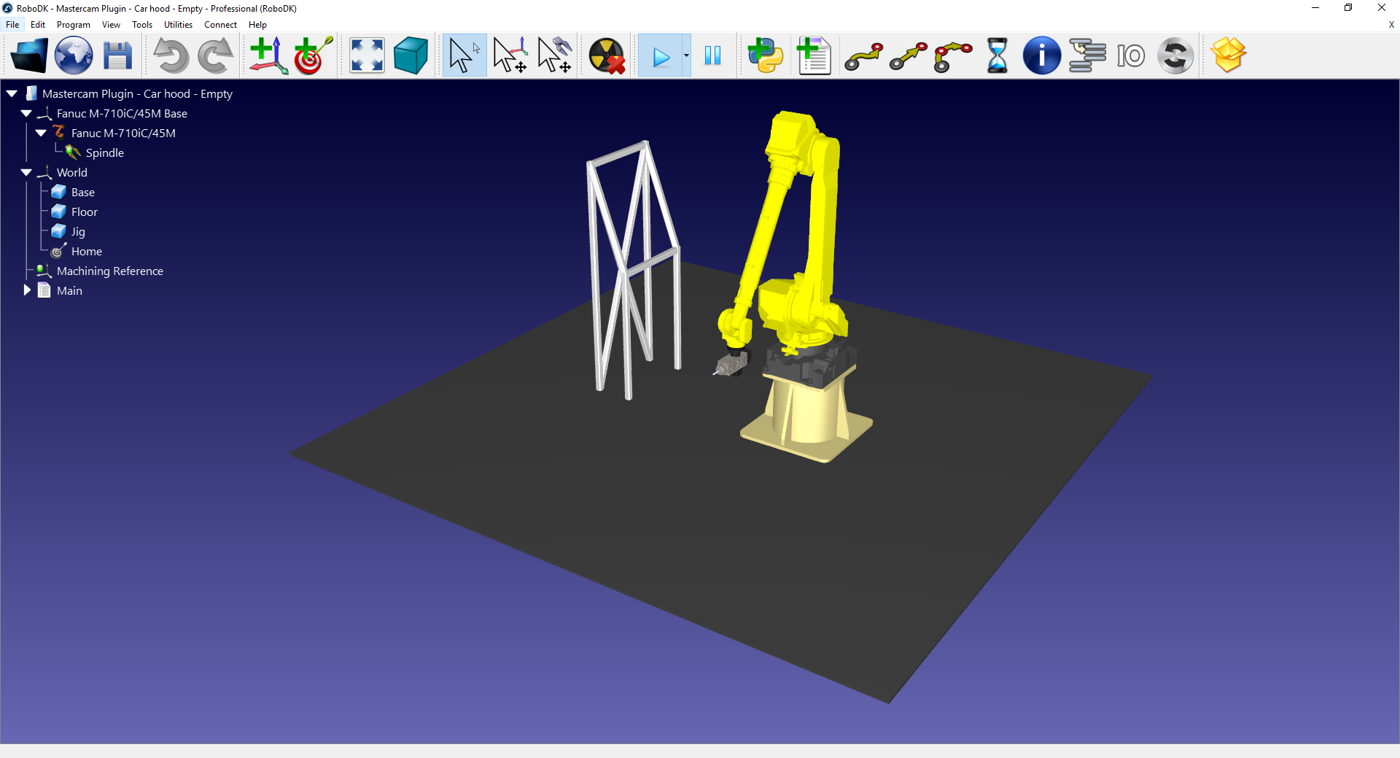
3.在 RoboDK 中创建一个包含机器人、主轴和其他所需物体的工作站。
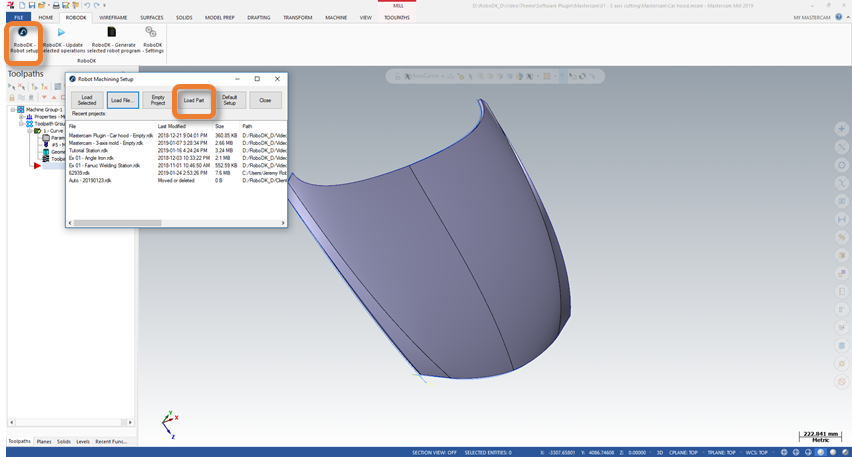
4.在 RoboDK 插件选项卡中,选择RoboDK➔ Robot setup。
5.在 "Robot Machining Setup"窗口中,选择 "Load Part"。
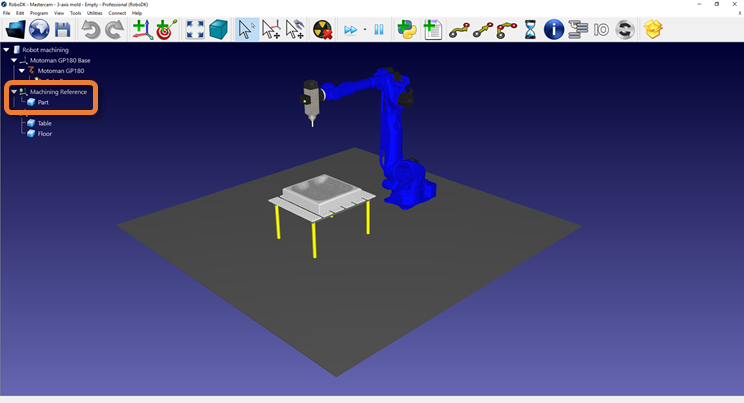
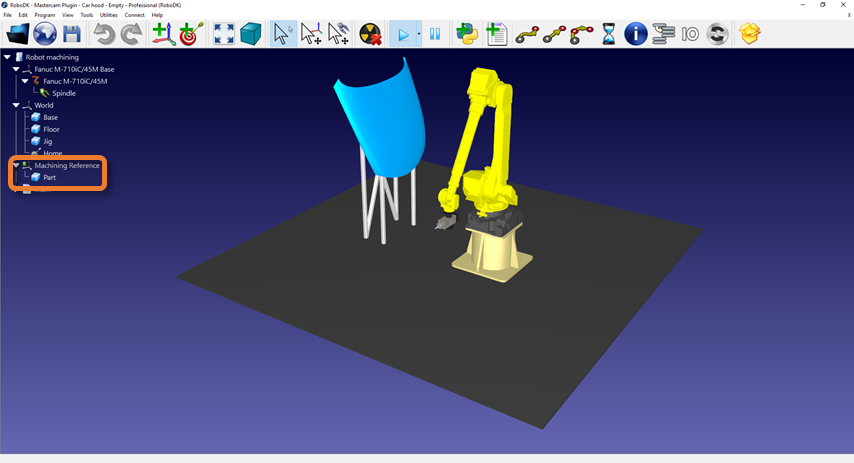
6.在 RoboDK 中,根据需要调整Machining Reference的位置。按住Alt 键,使用光标箭头移动参考帧,将工件重新置于机器人前方。
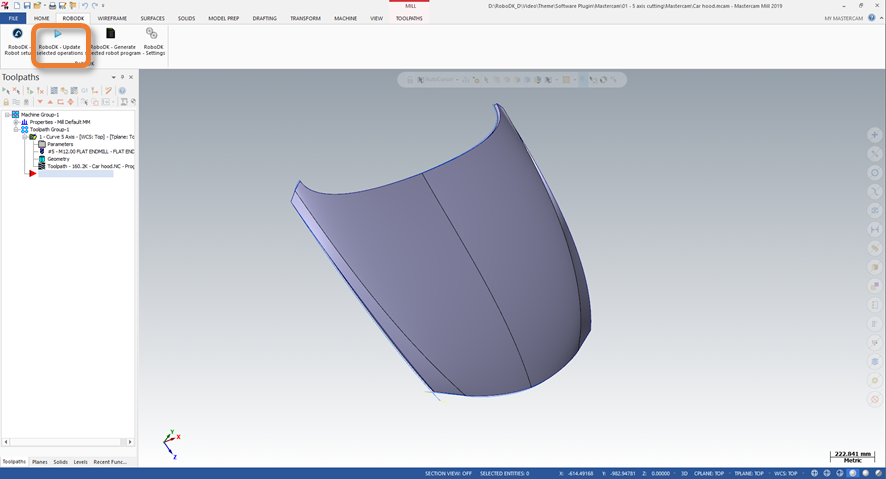
7.在 RoboDK 插件选项卡中,选择 RoboDK➔Update selected operations.。
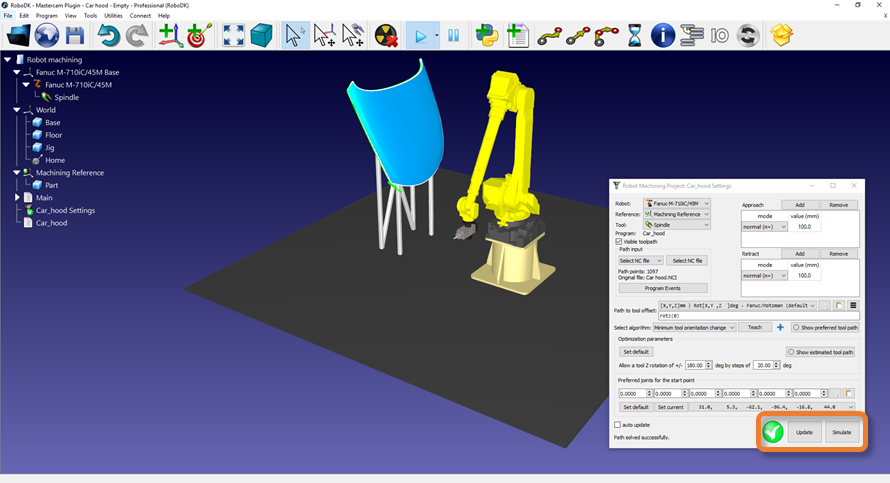
8.在 RoboDK 中,选择机器加工项目窗口中的更新和模拟。
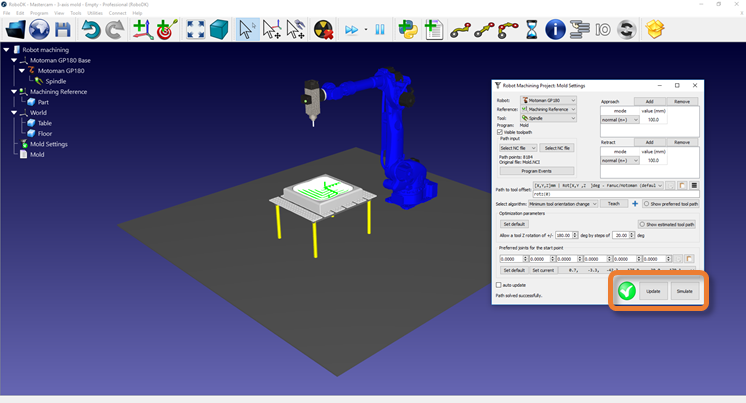
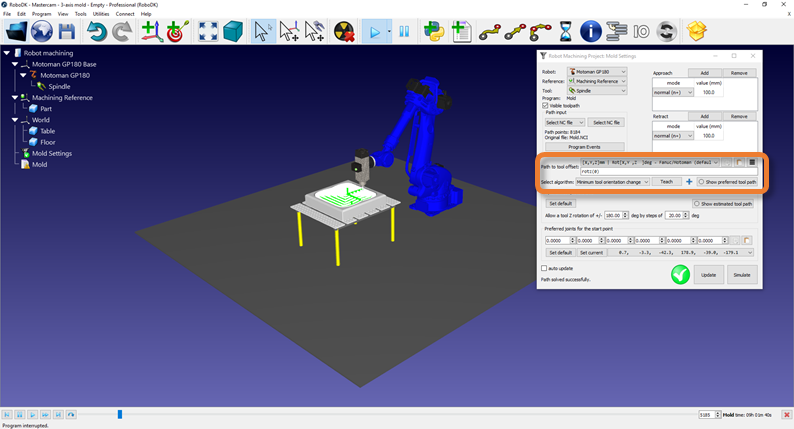
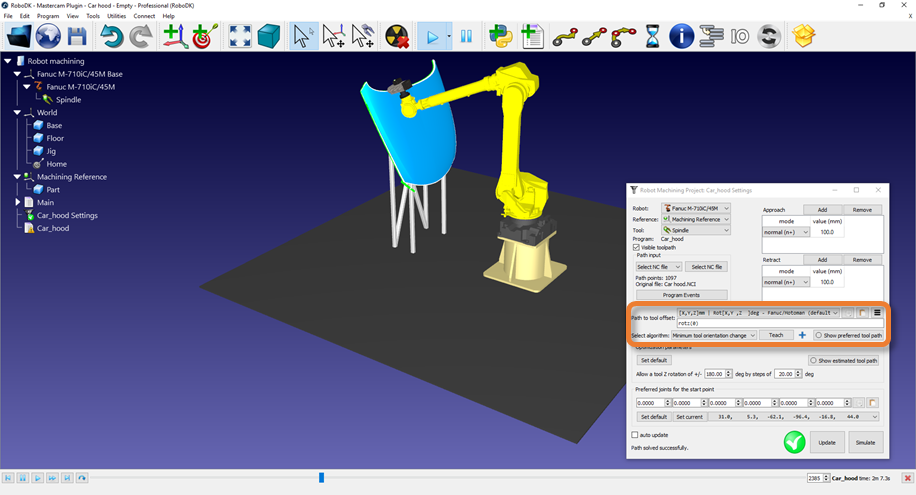
9.根据需要调整工具沿路径的方向。按住Alt键,用光标围绕工具的Z轴箭头调整方向。点击设计按钮,为路径设置所需姿态。点击按钮更新,以使用新姿态重新计算路径。点击按钮模拟,完成修改好的路径。
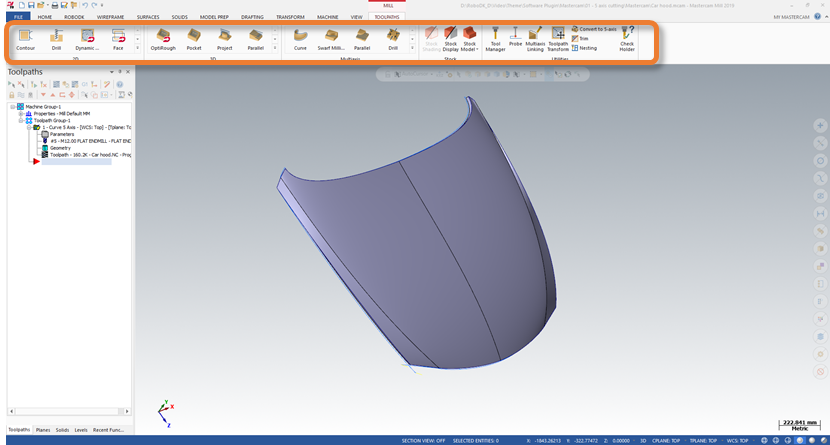
5轴机器人切割
本范例演示如何使用 Mastercam 插件创建五轴机器人切割项目。
Video:本视频展示了本节所述的相同步骤: https://www.youtube.com/watch?v=wdpQ76OGS5I。
1.在 Mastercam 中加载零件。
2.使用 Mastercam 铣削工具创建刀具路径。
3.在 RoboDK 中创建一个包含机器人、主轴和其他所需物体的工作站。
4.在 RoboDK 插件选项卡中,选择RoboDK➔ Robot setup。
5.在 "Robot Machining Setup"窗口中,选择 "Load Part"。
6.在RoboDK中,根据需要调整加工参考坐标系的位置。按住Alt键并用光标拖动坐标系的箭头,将零件重新定位到机器人前方。
7.在 RoboDK 插件选项卡中,选择RoboDK➔ Update selected operations。
8.在 RoboDK 中,选择机器加工项目窗口中的“更新” 和”模拟"。
9.根据需要调整工具沿路径的方向。按住Alt键,用光标围绕工具的Z轴箭头调整方向。点击按钮设计,为路径设置所需姿态。点击按钮更新,以使用新姿态重新计算路径。点击按钮模拟,保存修改后的路径。
手动安装插件
以下是手动设置Mastercam的RoboDK插件的步骤。如果使用 RoboDK 安装程序时,Mastercam 的 RoboDK 插件未按默认方式自动安装,则应按照这些步骤进行操作:
1.安装或更新 RoboDK: https://robodk.com.cn/cn/download
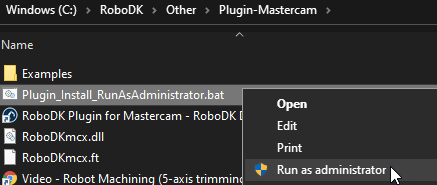
2.你可以在以下文件夹中找到为 Mastercam 安装 RoboDK 插件所需的文件:C:/RoboDK/Other/Plugin-Mastercam/.
3.右键点击Plugin_Install_RunAsAdministrator.bat 文件,选择以管理员身份运行。
如果该过程失败,则应按照以下步骤手动复制所需文件:
1.将RoboDKmcx.dll 和RoboDKmcx.ft 文件复制到Mastercam chooks 文件夹(C:\程序 Files\Mcam2020\chooks )。

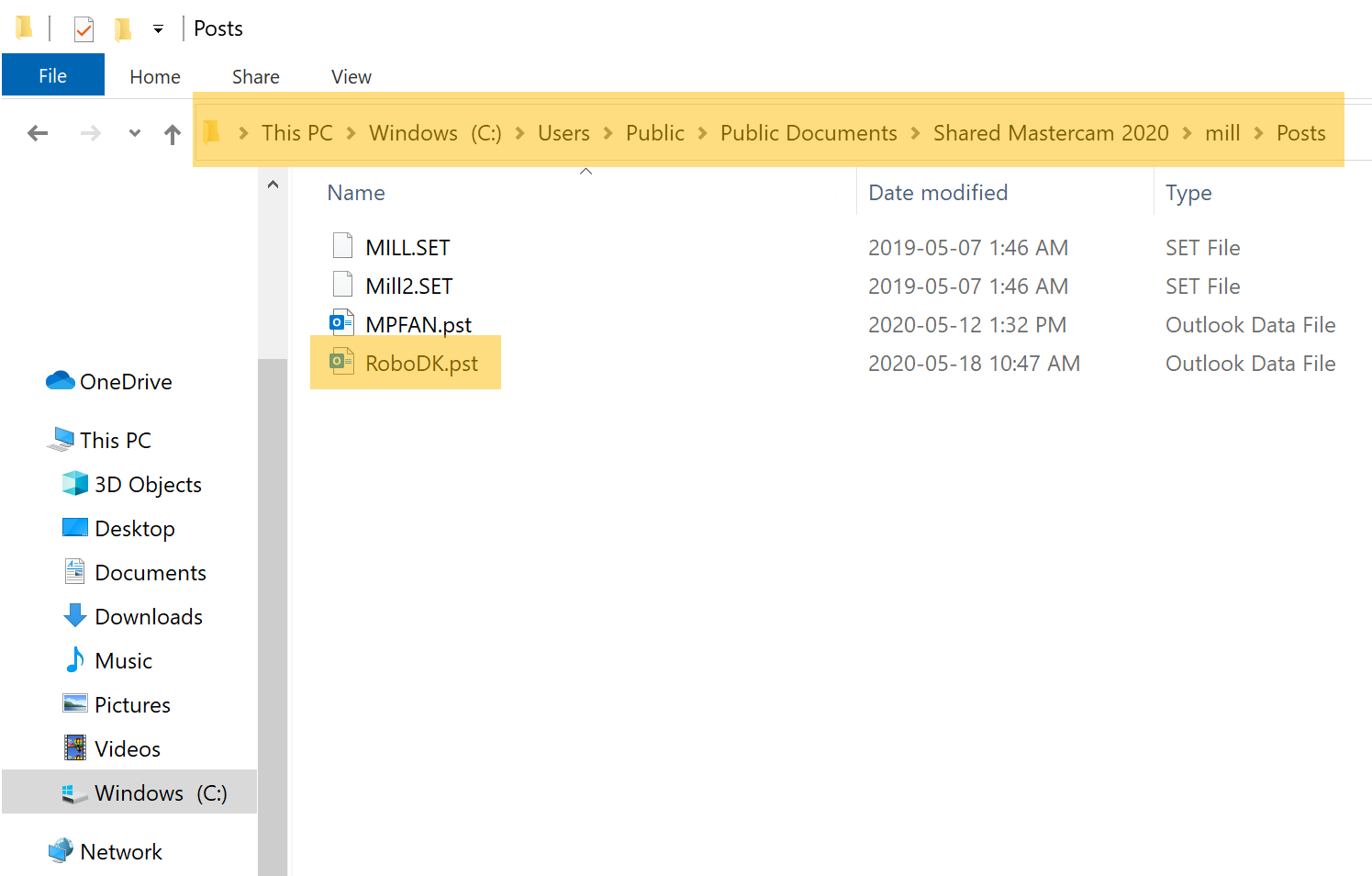
2.将RoboDK.pst 文件复制到文件夹中:C:\Users\Public\Documents\Shared Mastercam 2020\mill\Posts\.
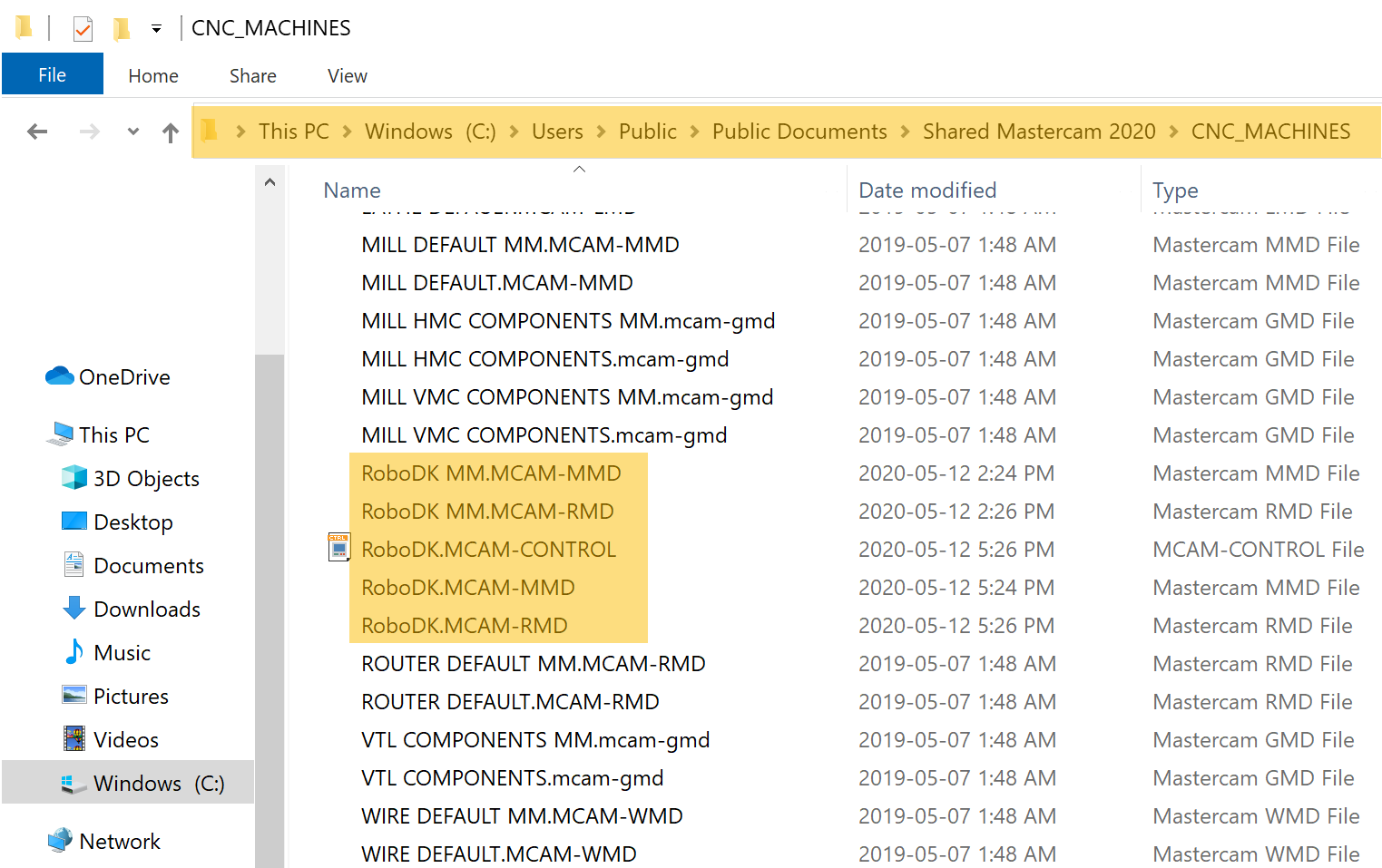
3.将以下机器定义文件复制到C:\Users\Public\Documents\Shared Mastercam 2020\CNC_MACHINES\ 文件夹中:
a.RoboDK.MCAM-MMD
b.RoboDK MM.MCAM-MMD
c.RoboDK.MCAM-RMD
d.RoboDK MM.MCAM-RMD
e.RoboDK MM.CONTROL
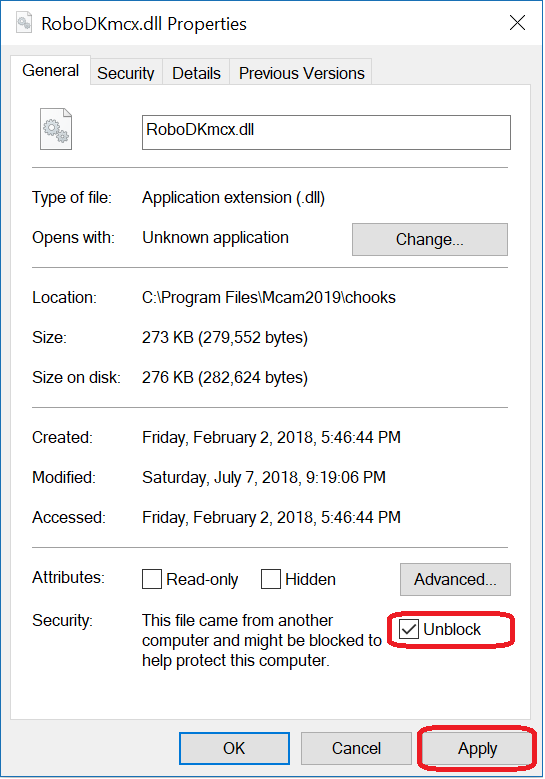
如果你在安装过程中遇到问题,可能需要右键点击RoboDKmcx.dll 文件,选择属性,然后勾选解除并选择应用,如下图所示。如果没有看到 "解除锁定 "选项,则无需执行此步骤。