RoboDK Plugin for MecSoft
简介
RoboDK的MecSoft插件可帮助用户直接从RhinoCAM或Visual CAD/CAM软件快速创建机器人加工项目。通过该集成,你能将MecSoft的CAD/CAM加工软件与RoboDK结合,模拟并编程工业机械臂完成加工作业。
更多机器人加工信息详见机器人加工章节。
Video:以下视频介绍了RoboDK与RhinoCAM 插件:https://youtu.be/iJqovzJO0ic。
本文档介绍如何为 Mecsoft 软件安装RoboDK 插件,以及如何使用 RhinoCAM 和 Visual CAD/CAM 在 RoboDK 中设置机器加工项目。
Tip:更好了解数控机床和机器加工机器人的区别,请阅读这篇文章:https://robodk.com/blog/robot-machining-vs-cnc/
安装插件
安装步骤:
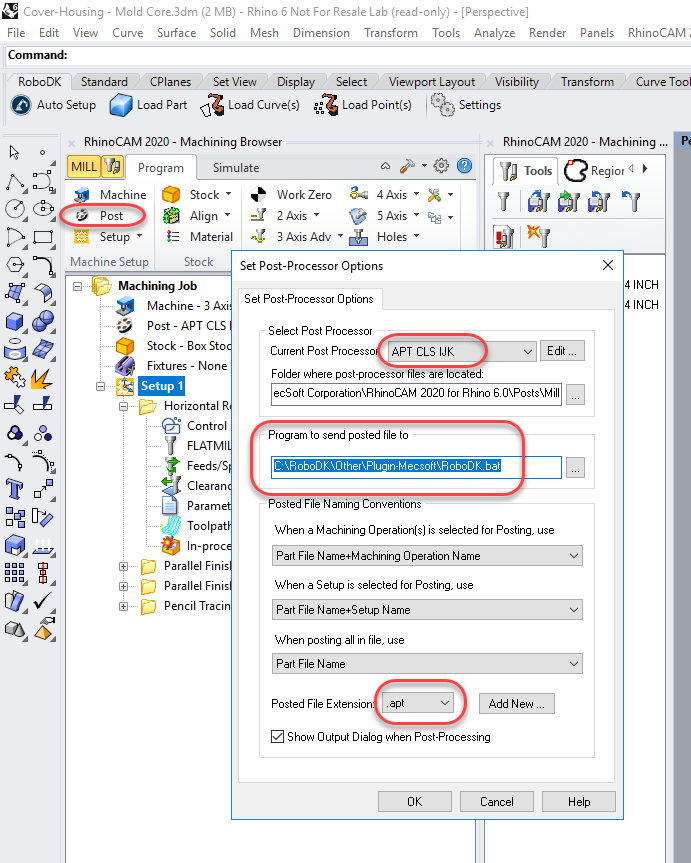
1.在RhinoCAM的加工浏览器中选择 Program 标签页。
2.选择Post
3.将Post设置为 APT CLS IJK
4.在输出路径中输入::
C:\RoboDK\Other\Plugin-MecSoft\RoboDK.bat
5.选择OK
Tip:若未定义机床,可设为通用3轴/5轴机床(需大工作空间)。
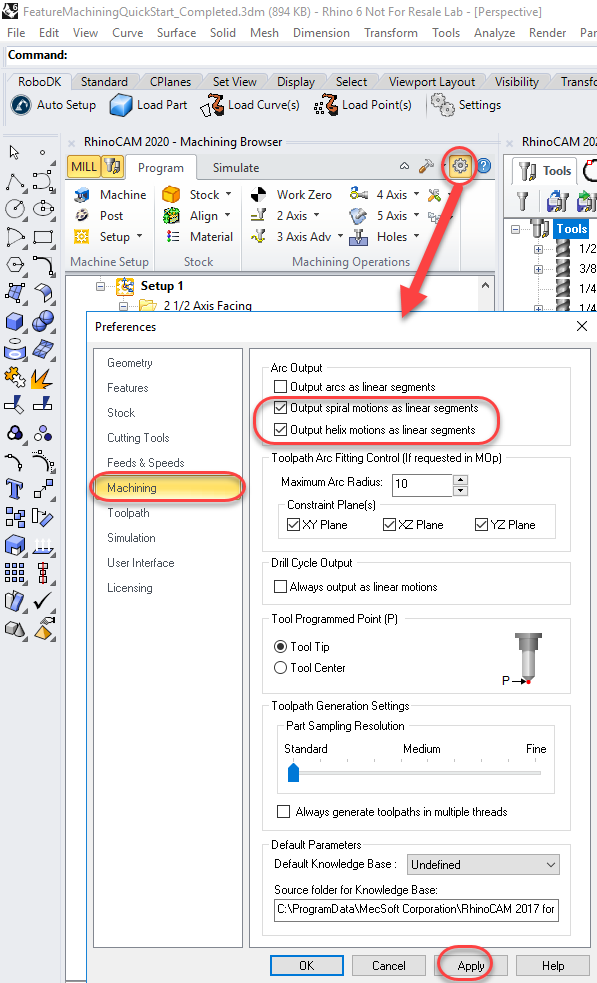
你还应将螺旋运动需转为线性指令(机器人不支持Helix命令):
1.选择CAM Preferences(如下图所示)
2.选择Machining选项卡
3.Output spiral motions as linear segments
4.Output helix motions as linear segments
操作指南
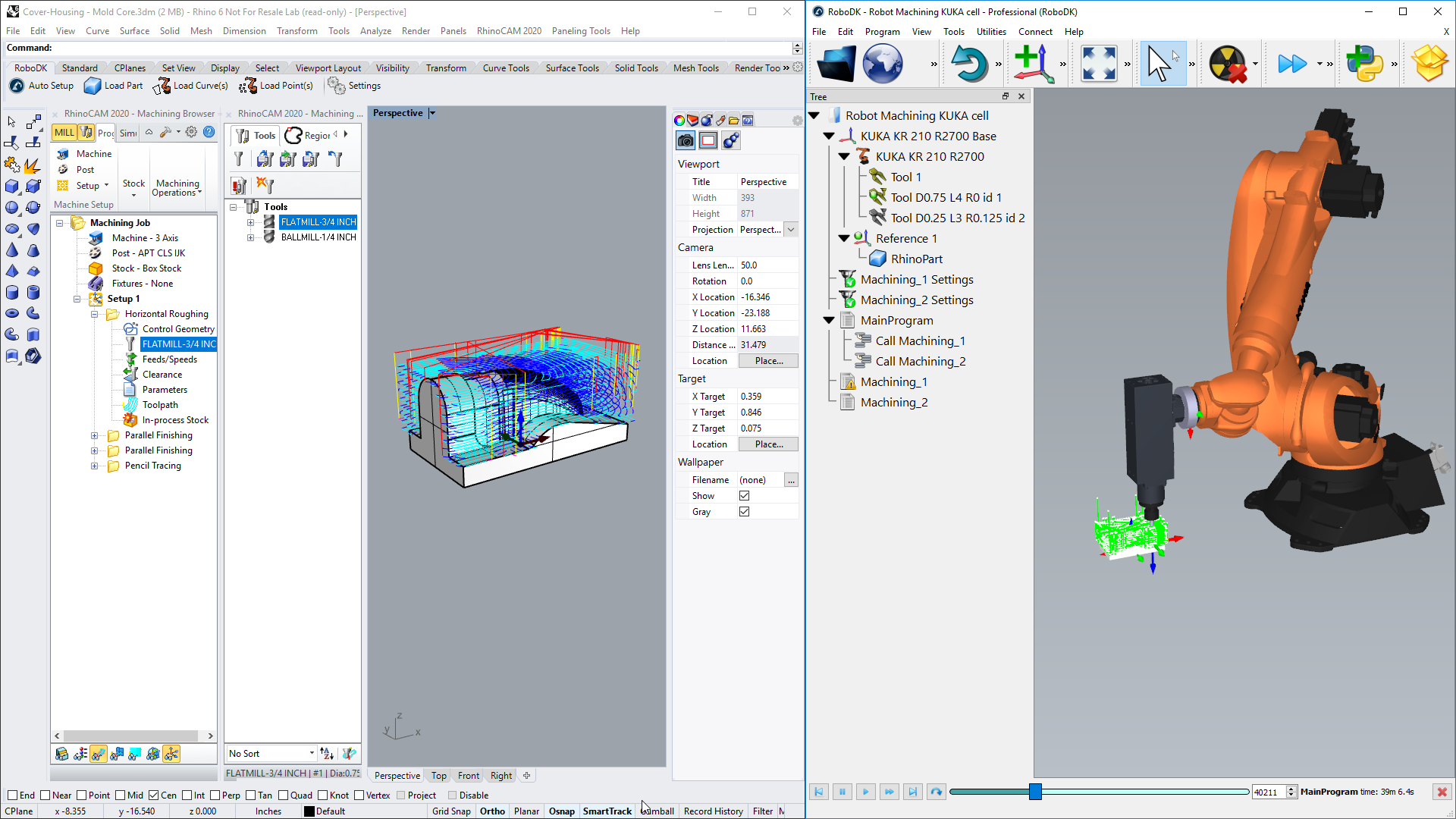
本节介绍将加工刀具路径发布到 RoboDK 时的 RoboDK 默认行为(如上一节所述)。
将加工程序发布到RoboDK后,系统会自动创建一个新项目,其中包含一个默认的机器人加工单元。该单元包括机器人、工具以及代表机器人加工基准的坐标系/基准面。
Tip:使用Rhino的RoboDK插件,可从 Rhino 工具栏自动加载 3D 模型。。
如果你已经打开了 RoboDK 工作站,它将使用现有的RoboDK项目,而不会覆盖机器人、工具或坐标系。。
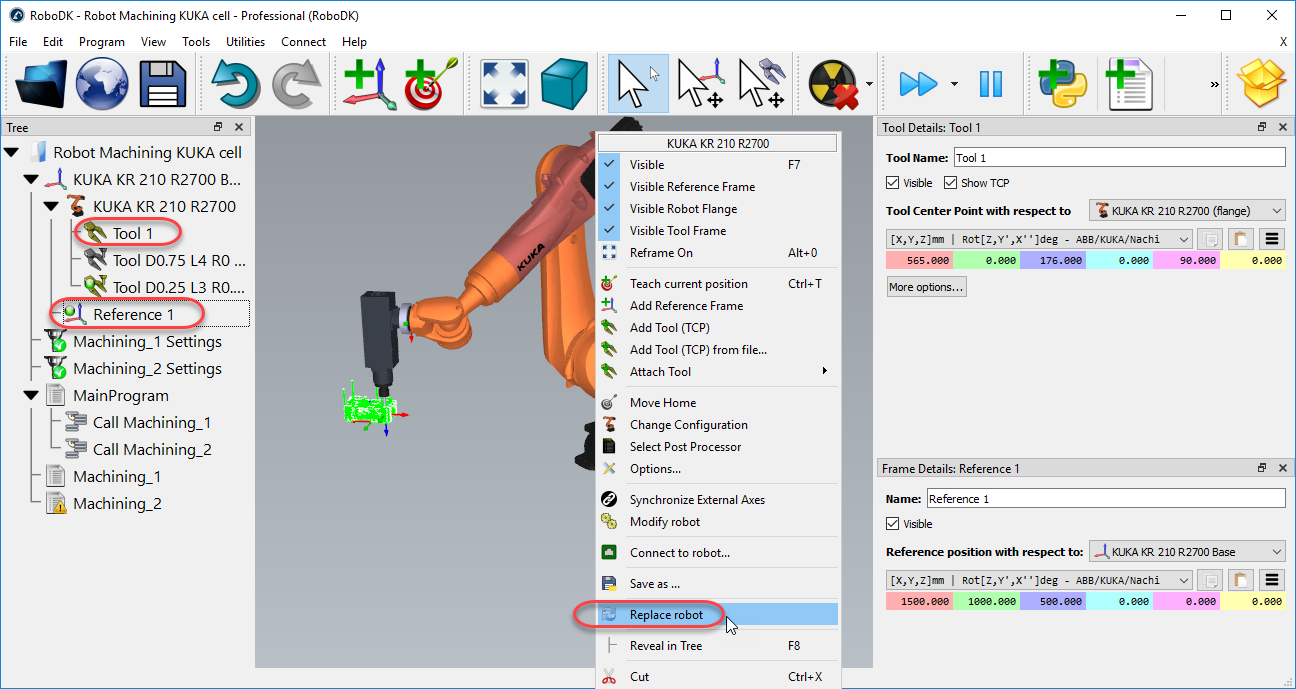
你可以轻松更换机器人、修改工具和/或参考坐标系。例如,请按照以下步骤更换机器人:
1.右键点击机器人
2.选择替换机器人,如下图所示
3.选择要使用的机器人
RoboDK安装程序默认仅提供少量机器人型号,但你可以从在线资源库下载更多机器人。
更多关于添加机器人工具的信息详见入门指南。
Tip:按住Alt 键移动坐标系或机器人。
Tip:按住 Alt+Shift 键移动工具(TCP)。
选择文件➔ 保存工作站 (Ctrl+S),保存项目。
机器人加工
更新机器人单元后,点击实用程序➔ 更新机器人加工项目 (Ctrl+U) 检查可行性。如果程序在当前单元参数下可行,则会显示绿色标记。如果存在任何问题(如奇异点、轴限制或到达问题),则会显示红色标记。
双击机器人加工项目
右键点击程序并选择运行,即可对其进行仿真(或双击程序)。你也可以选择生成机器人程序(F6),为机器人控制器生成机器人程序。更多关于如何生成机器人程序的信息详见离线编程章节。
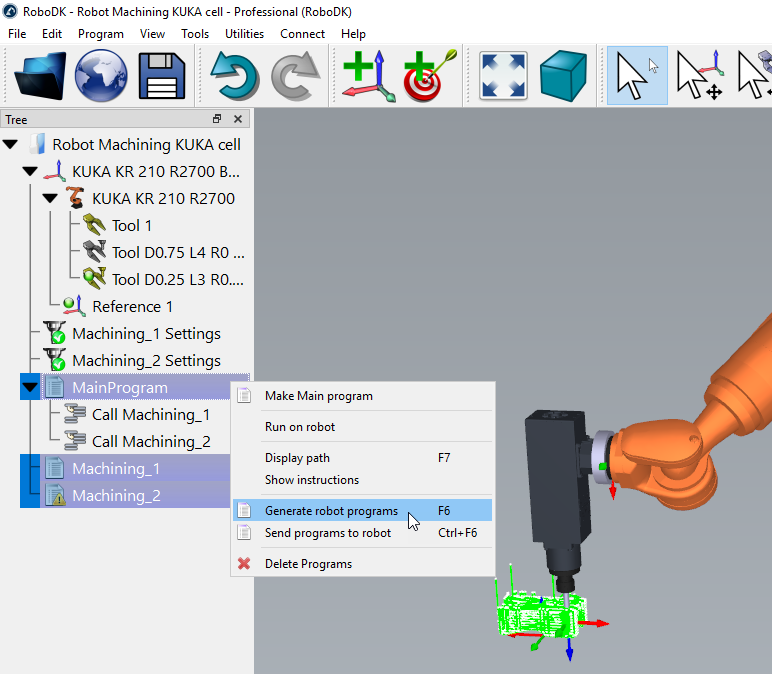
你也可以右键点击程序,选择 "选择后处理器 "更改后处理器。更多有关后处理器的信息详见后处理器章节。
生成程序
右键点击 RoboDK 中的程序,选择生成机器人程序 (F6),即可生成用于机器人加工的机器人程序。
Tip:你还可以点击"后处理器 "更改后处理器。更多信息详见后处理器部分。
Tip:你还可以通过MecSoft软件将以下文件提交以自动生成机器人程序:C:\RoboDK\Other\Plugin-MecSoft\RoboDK_Export.bat。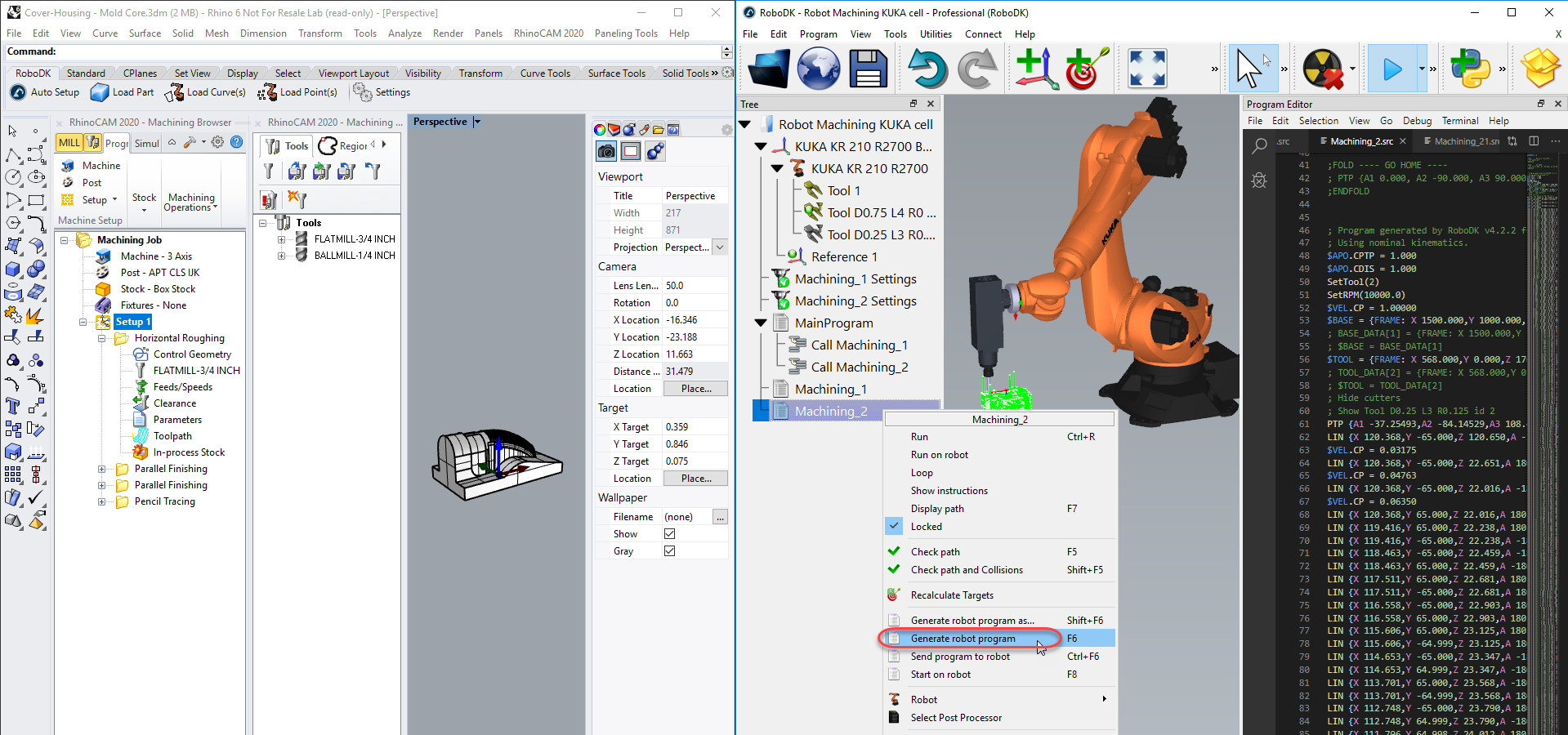
按照以下步骤在RoboDK中更改保存机器人程序的位置::
1.点击工具-选项
2.点击程序
3.点击机器人程序文件夹旁的设置
范例
3轴机器人加工
本范例演示如何使用 RhinoCAM 和 RoboDK 创建三轴机器人机器加工项目。
Video:使用 RhinoCAM 和 RoboDK 进行三轴机器人加工:https://youtu.be/iJqovzJO0ic。
5轴机器人加工
本范例展示了如何使用 RhinoCAM 和 RoboDK 创建用于雕刻的五轴机器加工项目。该项目使用与线性导轨和双轴转台(9 个同步轴)同步的库卡(Kuka)机器人。

Video:MecSoft RhinoCAM 雕塑机器人加工:https://youtu.be/G0ncoALOaqM。