范例
本节展示如何将Rhino项目导入RoboDK,用于机器人仿真与离线编程的基础操作案例。
穹顶雕刻
Video:使用 Rhino 和 RoboDK 进行穹顶雕刻:https://www.youtube.com/watch?v=hgS-CmmGUOI。
穹顶条纹加工
本案例演示如何加载RoboDK默认工作站,并通过机器人跟随Rhino中定义的曲线轨迹。
1.在 Rhino 中打开穹顶范例文件。
2.点击 RoboDK 选项卡,选择
3.点击:Load Project...
4.选择:Default Setup。RoboDK将启动并加载包含库卡(KUKA)机器人、主轴工具(工具1)和参考坐标系(参考系1)的示例项目
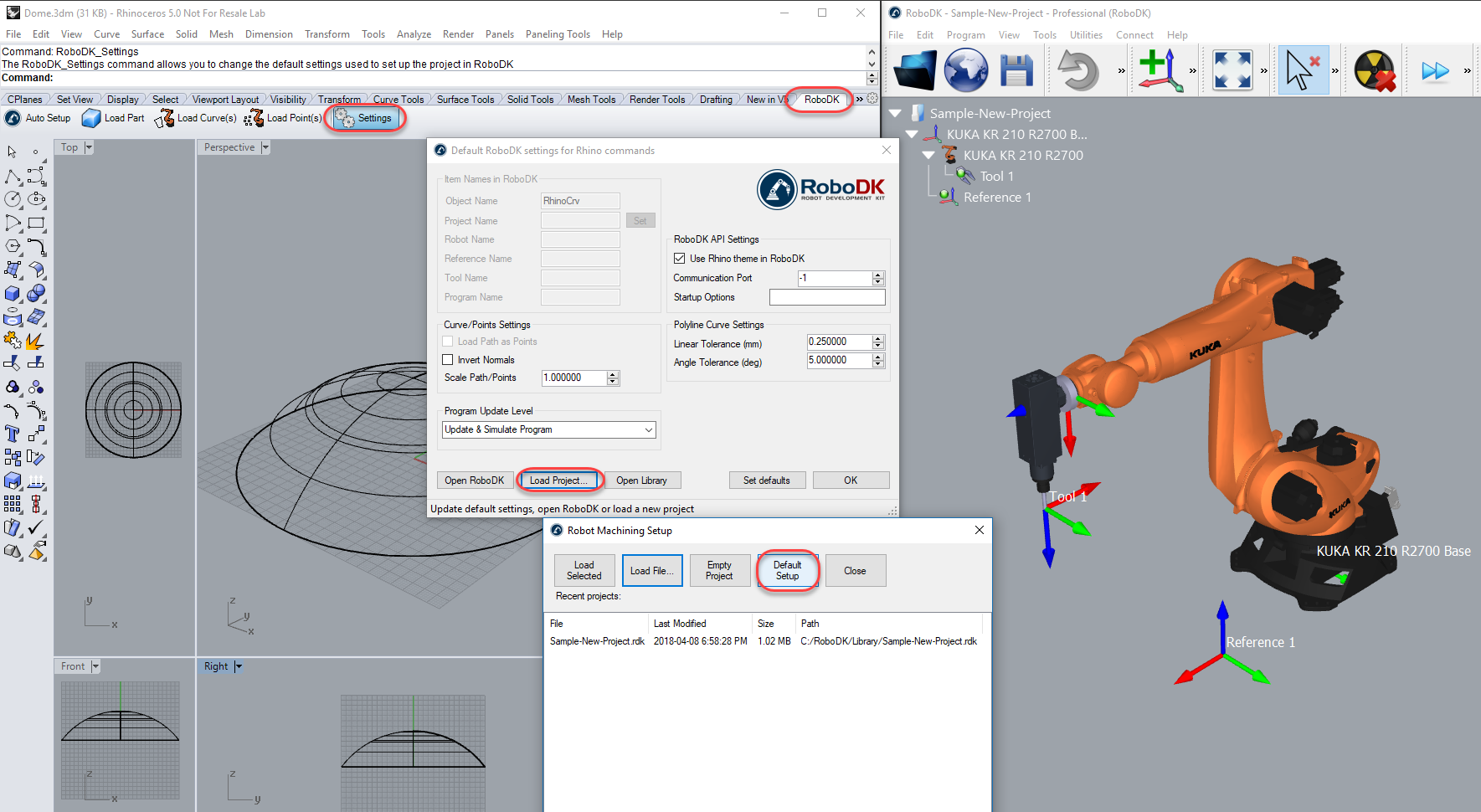
5.关闭 "Settings "窗口或选择 "OK"。
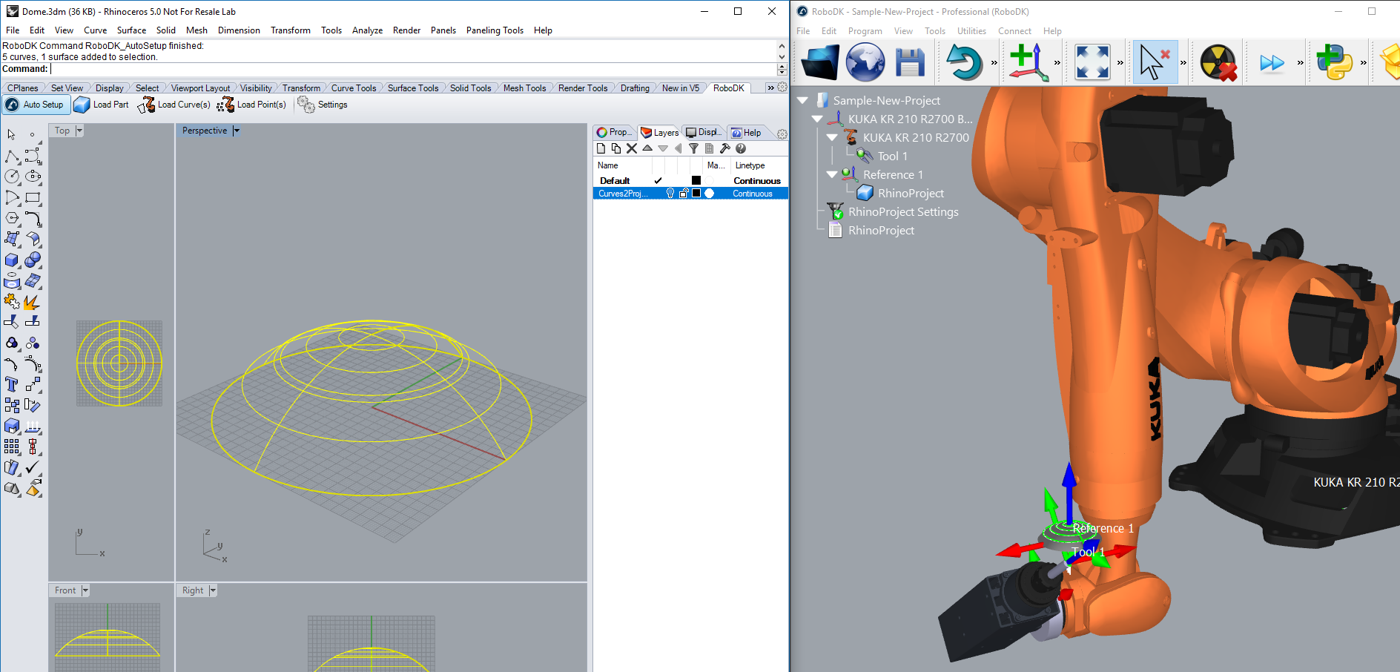
6.在Rhino 中点击
7.选择所有曲线和曲面,然后按 Enter 键(或点击鼠标右键)。项目将加载到 RoboDK 中,如下图所示。
此时,零件应出现在被激活的参考系(Reference 1)上,且RoboDK中会生成一个跟随曲线轨迹的曲线跟踪项目(Tool 1)。
Tip:按+/-键可放大/缩小参考系显示。
若发现曲面法线方向相反,按以下步骤修正:
8.再次打开Settings。
9.勾选Invert Normals选项。
10.点击OK。
11.重复步骤6-7。
修正后,机器人将从上方向接近工件,工具路径可正常执行。
Tip:按住Alt键可拖动参考系或机器人。
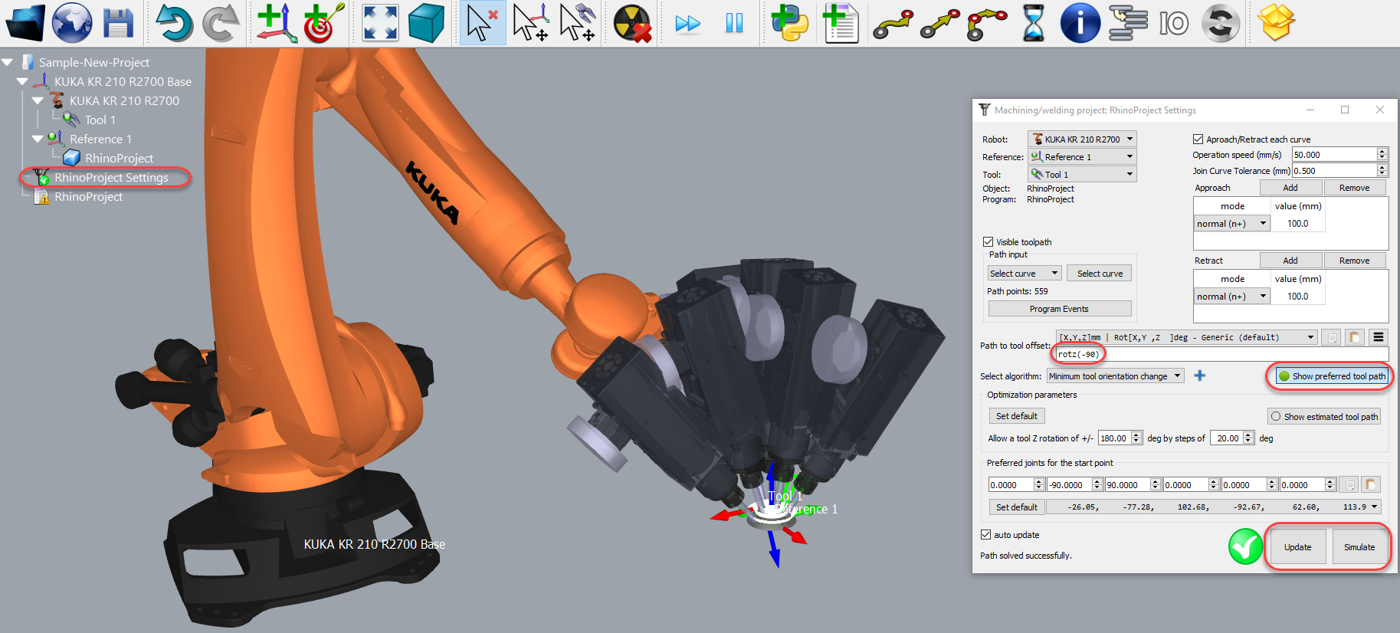
双击 RoboDK 树中的
例如,你可以选择Show prefrerred tool path显示优先的工具路径,查看并修改工具相对于零件的默认方向。更换Path to tool offset路径对于工具的偏移可定义额外的旋转。为此,你可以输入一个新值,或者使用鼠标滚轮快速预览结果。
更多有关更改设置的信息详见机器人加工章节。
最后,当仿真按照预期发生后,你就可以生成程序或导出仿真:
12.右键单击程序 RhinoProject
13.选择生成机器人程序 (F6)。将生成并显示机器人程序。
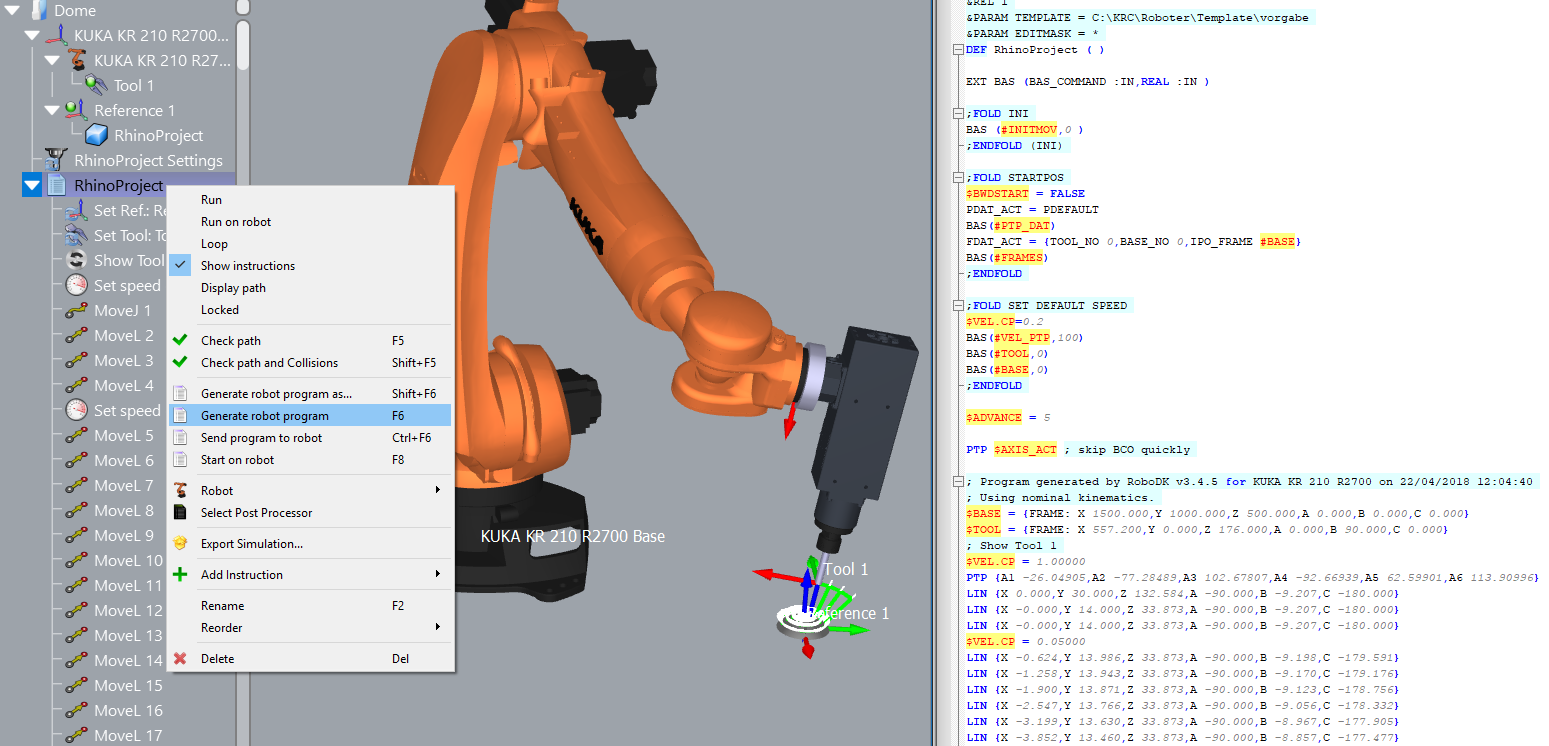
Tip:右键单击程序并选择 "Show Instructions显示指令",即可查看生成的指令并调试程序。选择"Add Instruction添加指令"可以手动添加新指令。
Tip:更多有关选择正确的后处理器信息详见后处理器章节。
Tip:选择导出仿真可生成 3D HTML 或 3D PDF 仿真。
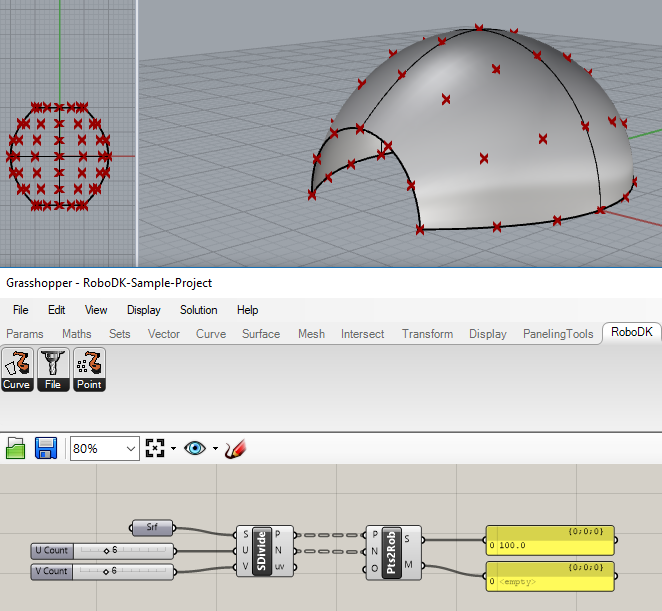
Grasshopper范例
本案例展示如何通过Grasshopper插件将曲面网格化为钻孔点,并驱动机器人执行钻孔任务:
1.打开RoboDK插件附带的Grasshopper示例文件(.3dm与.gh文件)。
Tip:在Rhino输入Grasshopper命令启动插件。
2.右键点击Pts2Rob组件,选择Robot Setup Options(RoboDK)。选择Load Project…并选取Default Setup以加载一个示例RoboDK工作站(同前例)
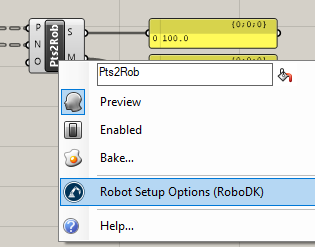
你可以选择提供物体名称作为组件输入(O)提供。你还可以在组件选项中指定一个项目,以便每个组件都使用所需的 RoboDK 项目。
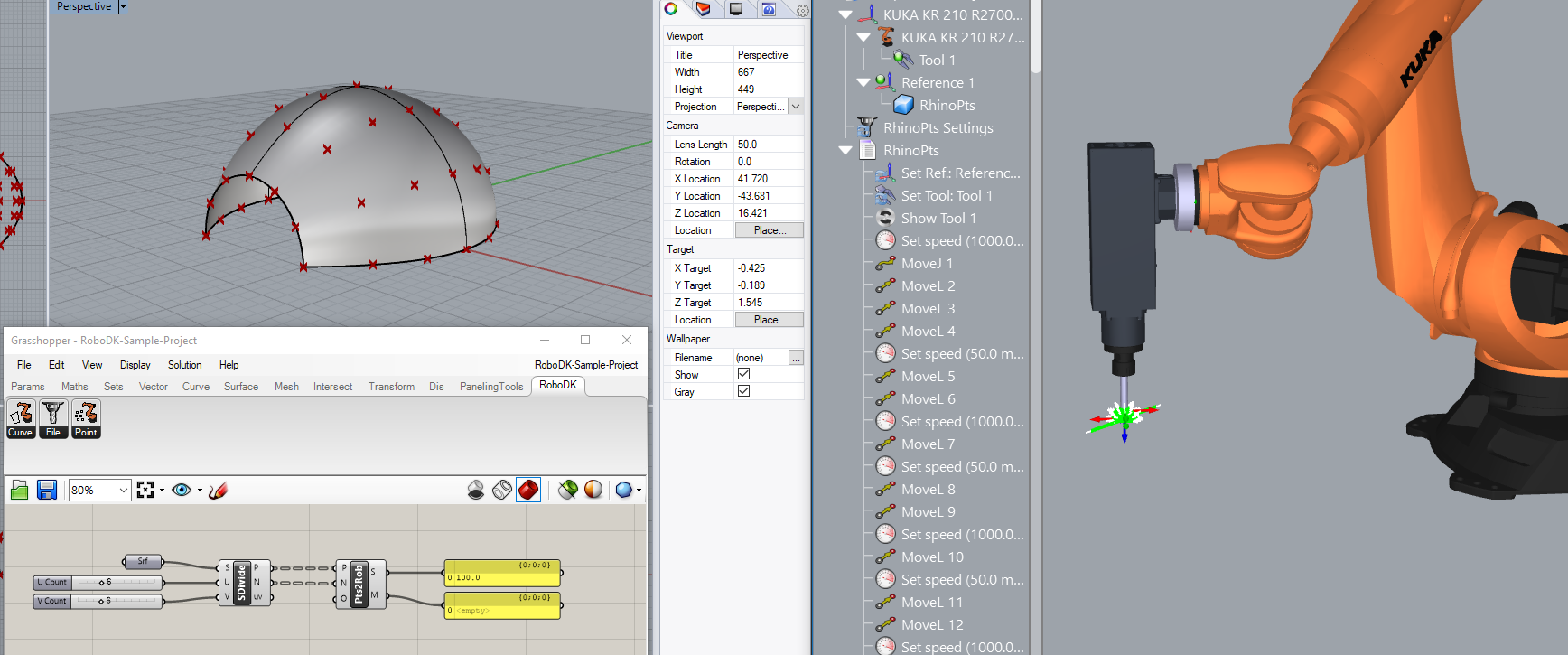
3.在 Grasshopper 中,可以选择Solution➔ Recompute (F5) ,更新零件和 RoboDK 中的程序。
Note:在RoboDK中调整工具/参考系坐标;其他操作同前例(如程序生成与仿真导出)。
Tip:右键单击程序并选择 "Show Instructions显示指令",即可查看生成的指令并调试程序。选择"Add Instruction添加指令"可以手动添加新指令。
Tip:更多有关选择正确的后处理器信息详见后处理器章节。
Tip:选择导出仿真可生成 3D HTML 或 3D PDF 仿真。