操作流程
在hyperMILL/hyperCAD-S中,你可以使用RoboDK插件简化加工项目发送到RoboDK的流程。
在hyperMILL/hyperCAD-S创建机器人加工项目:
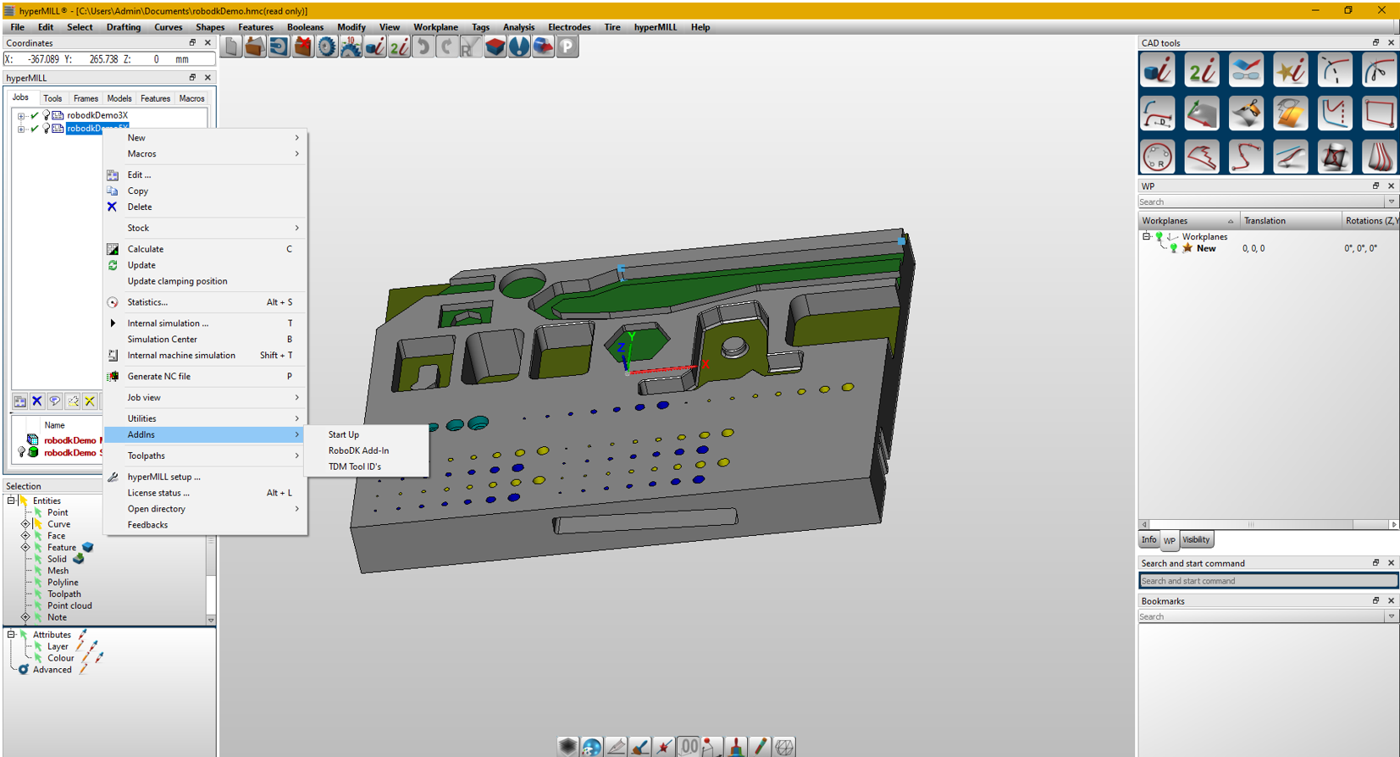
1.右键点击:Job
2.选择:Addins
3.选择:RoboDK Add-In
Note:向RoboDK发送程序时,对于3轴机床应使用内置的DIN_ISO后处理器;对于5轴增材制造则应使用名为APT_R05a_E03的后处理器。
如果所选机器人可以执行该程序,则会显示一个绿色勾号。如果存在任何问题(例如奇异点、轴限位或可达性问题),则会显示红色标记并附上问题说明。
双击
右键点击程序,并选择运行,即可对其进行仿真(或双击程序)。你也可以选择生成机器人程序(F6),获取需要加载到机器人控制器上的机器人程序。有关如何生成机器人程序的更多信息,请参阅离线编程。
如果需要,右键点击程序选择:选择后处理器程序。这一步可以帮助你定制生成代码的外观。有关选择和自定义后处理器的更多信息,可参考后处理器章节。