柯马机器人专用插件
该插件是RoboDK为柯马机器人开发的专用模块。安装方法参见文档的插件章节。
获取柯马RCS模块并激活后,即可使用该插件创建RSS程序:
操作流程:
1.在主菜单中选择:程序➔ RRS for Comau ➔ Setting
a.设置机器人ID(通常为0)
b.指定机器人文件夹路径(包含.c5g/.CIO/.xml文件的目录)
c.指定机器人文件路径(.c5g文件)
d.指定RRS动态库路径(通常为rcscomau.dll)
2.右键单击程序➔ Generate RRS Program (Comau)
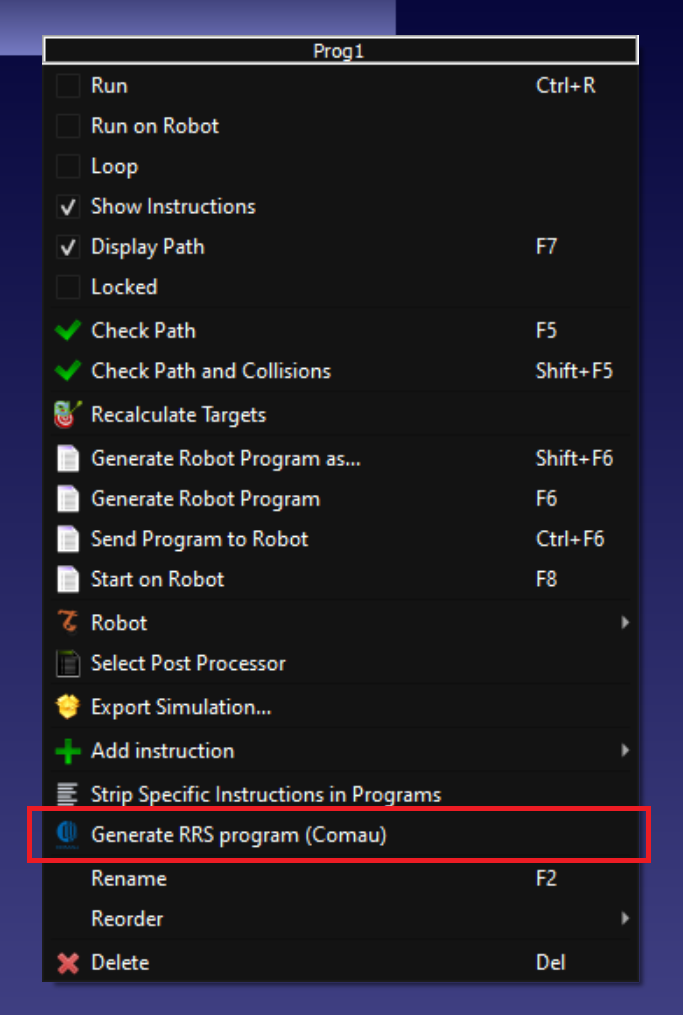
系统将创建包含精确关节数据的新程序,并在程序名中显示节拍时间估算值。
Note :RoboDK默认使用毫米/秒(mm/s)和度/秒(deg/s)作为速度单位,但包括柯马在内的部分控制器采用百分比(%)。使用RRS解析的输入程序需统一采用百分比单位。