C#
C# 程序可直接在机器人上执行,使用与仿真相同的 C# 代码。在线编程允许使用机器人驱动器在特定机器人控制器上运行通用程序。请按照以下步骤使用 C# 示例项目测试该功能:
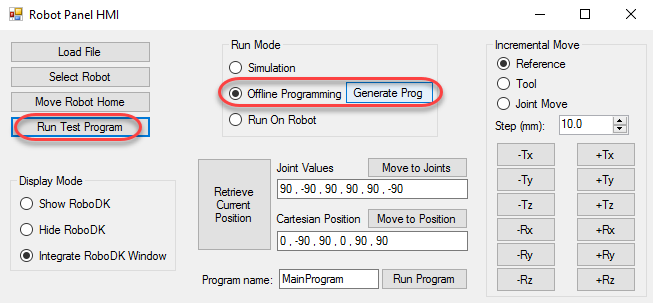
1.在运行模式部分选择在机器人上运行
2.选择能让机器人移动的其他命令
动作将在真实机器人上运行,模拟器将与机器人同步动作。
Important: 使用机器人驱动器(右键单击机器人,然后选择连接到机器人...)时,需要在电脑和机器人之间建立连接。更多信息,请参阅 "机器人驱动器”。
Note: RDK/Robolink 连接的运行模式改为 RUNMODE_RUN_ROBOT,以便在机器人上执行动作。例如
RDK = Robolink();
RDK.setRunMode(RUNMODE_RUN_ROBOT);
Tip:C:/RoboDK/Library/Macros/ 文件夹中的SampleOnlineProgramming.py宏提供了一个在 RoboDK 图形用户界面外进行在线编程的 Python 示例。
Note:有关通过 API 使用机器人驱动器的更多信息,请参阅 "机器人驱动器 "。