C#
当机器人使用此类命令时(如MoveJ、MoveL或setDO),系统将默认在C#仿真下运行该程序。当C#示例项目启动时,系统也会默认设置C#为仿真模式。
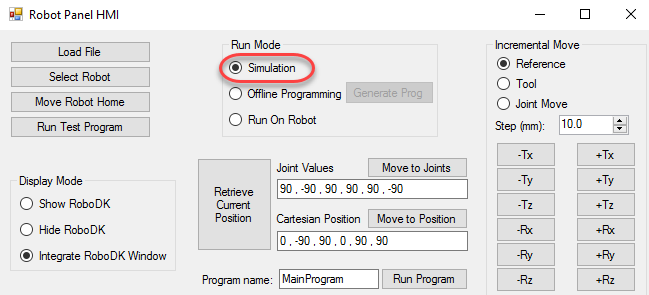
这意味着机器人运动将在RoboDK中进行仿真。例如,我们可以通过右侧按钮(+Tx、-Tx等)以10毫米为步长移动机器人,也可以选择"运行测试程序"让机器人在当前位置周围执行六边形轨迹运动。
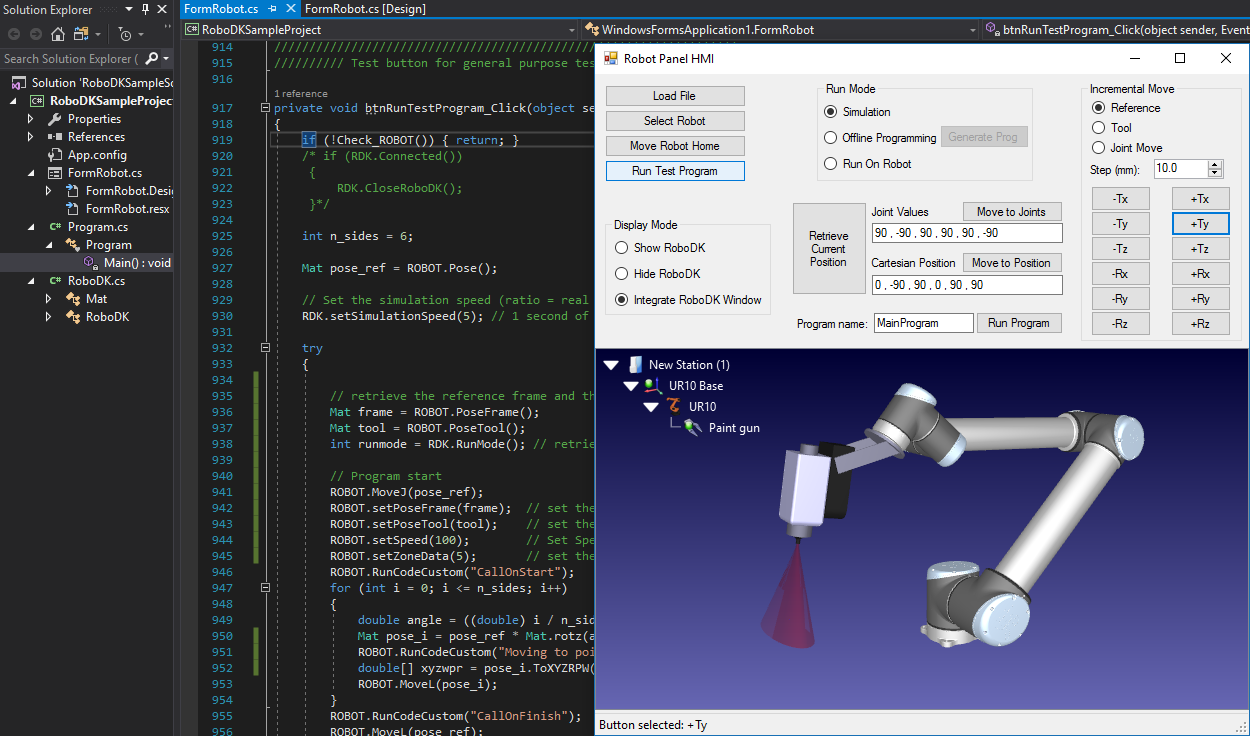
设置一些断点来调试应用程序并测试该机器人的目标范围。机器人的目标范围可以定义为关节坐标或Mat变量(4x4姿态矩阵),通过使用XYZWPR形式可以帮助排除一些程序问题。更多相关信息请查阅参考坐标系。