Python
可以使用与机器人仿真相同的Python代码离线生成Python程序(如前面Python仿真所示)。离线编程能够生成可在特定机器人控制器上执行的程序:
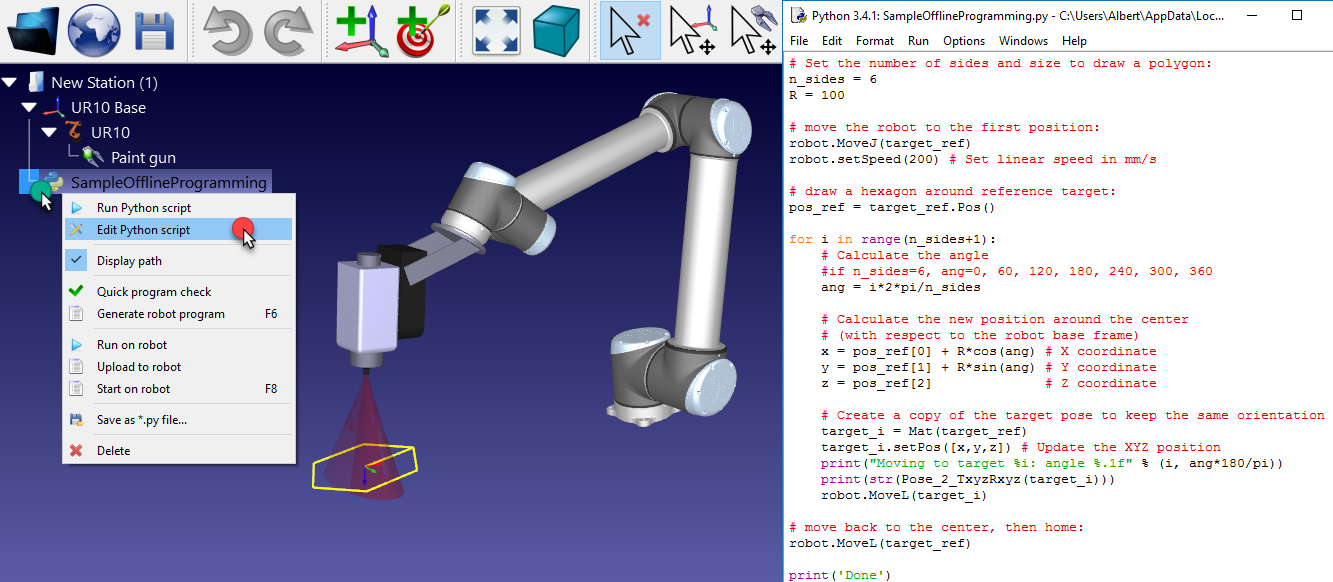
1.右键单击
2.选择生成机器人程序 (F6)
在此情况下,程序并非通过模拟运行,而是快速执行以获取结果:一种专用于机器人控制器的机器人程序。
Tip:右键单击机器人,选择 "选择后处理程序",为离线编程选择不同的后处理器(如后处理器部分所示)。
Note:"生成机器人程序"选项将自动把RDK/Robolink连接的运行模式设置为 RUNMODE_MAKE_ROBOTPROG。换句话说,如果Python程序在RoboDK图形用户界面之外执行,可以通过编程方式生成特定厂商的机器人程序,而非仅进行模拟。例如
RDK = Robolink()
RDK.setRunMode(RUNMODE_MAKE_ROBOTPROG)