RoboDK CNC
RoboDK CNC是一套工具集,可将工业机器人模拟为数控机床使用。其流式处理模式支持执行不限行数的大型加工程序,这类程序通常由CAD/CAM系统生成。
由于大多数机器人控制器内存有限,无法直接加载大型程序。RoboDK CNC通过"滴灌"技术(逐行或分组发送指令至控制系统)突破此限制。
当前版本提供专用于库卡(KUKA)控制器的插件,并为特定控制器提供优化后处理器以实现此功能。
安装插件
若已安装Add-in Manager插件,可以到RoboDK 在线资源库下载该插件。
Note:此插件目前仅适用于库卡(Kuka)控制器,其他机器人控制器请使用相应的后处理器。
Note:手动安装方式:通过工具➔插件(Shift + I),双击加载 PluginCNC.dll。
需在库卡控制器端安装C3Bridge接口服务器,具体参见库卡(Kuka)的 RoboDK 驱动程序。
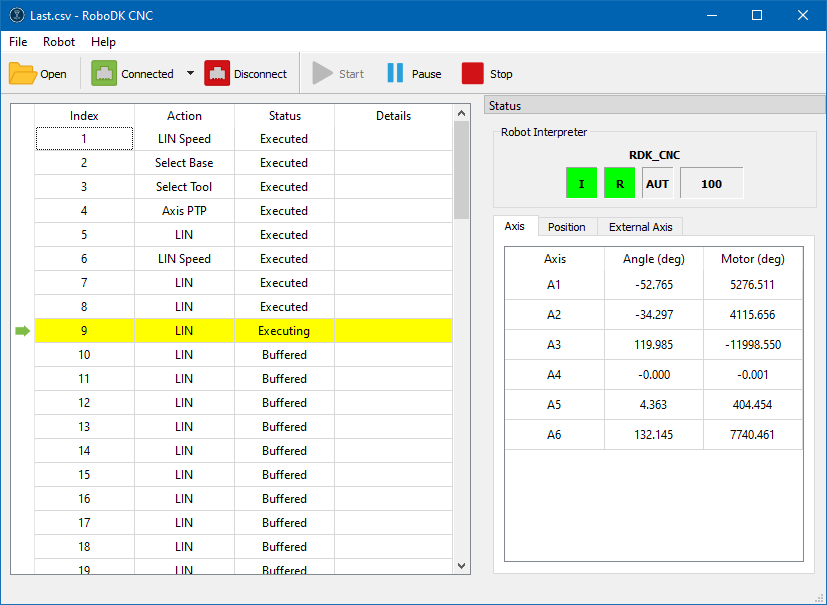
用户界面
RoboDK CNC允许将大型程序提供给机器人控制器。
RoboDK CNC的主界面包含以下模块:
1.主菜单
2.工具栏
3.教学台面
4.状态面板
主菜单和工具栏操作重叠。
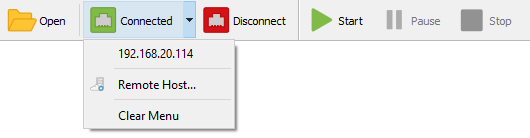
| Open | 打开由RoboDK CNC后处理器生成的CSV文件。 |
| Connect | 此图标表示当前未与机器人控制系统建立连接。点击该按钮将显示连接历史菜单。 |
| Remote Host... | 该操作将弹出"新建连接"对话框,用于连接远程机器人控制系统的IP地址与端口。 |
| Connecting | 此图标表示正在尝试与机器人控制系统建立连接。 |
| Connected | 此图标表示已成功连接至机器人控制系统。 |
| Disconnect | 该操作将立即中断与机器人控制系统的连接。请注意:即使断开RoboDK数控模块,机器人仍可能持续运动。 |
| Start | 从第一条指令开始执行机器人运动,或继续运行先前已启动的程序。 |
| Pause | 暂停执行已启动的程序。 |
| Stop | 取消程序执行并停止机器人运动。 |









状态面板显示当前运行的KRL程序信息、就绪状态与速度倍率指示,以及机器人实时位姿数据。
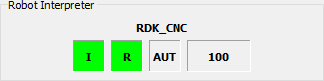
机器人解释器面板包含四个状态指示模块:
Robot Drives and Motion 驱动与运动状态 |
| 驱动已启用:机器人驱动器上电,具备运动条件 |
| 驱动已禁用:机器人执行机构断电,处于不可操作状态 | |
KRL Program Status KRL程序状态 |
| 程序未加载:未检测到可执行程序 |
| 程序已就绪:完成程序加载等待启动 | |
| 程序执行中:正在运行机器人程序 | |
| 程序异常中断:因错误导致执行中止 | |
| 程序执行完成:所有指令已正常执行完毕 | |
Robot Controller Mode 控制器运行模式 |
| 显示控制系统当前模式,可选值包括: ²T1(手动低速模式) ²T2(手动高速模式) ²AUT(自动模式) ²EXT(外部控制模式) |
Speed Override 速度倍率设置 |
| 程序执行速度调节百分比(0-100%可调) |









操作流程示例
本节演示通过RoboDK数控模块在KUKA控制器上运行程序的完整流程:
1.启动应用程序:启动 RoboDK CNC应用程序:启用插件后点击:实用程序➔ RoboDK CNC。
Tip:使用RoboDK数控后处理器生成程序时,可能自动弹出本应用
2.建立远程连接:确保 C3 Bridge 接口服务器运行状态下,连接至机器人控制系统。
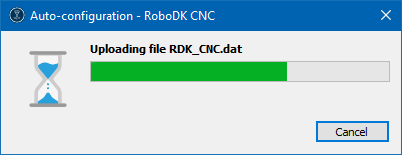
3.首次配置向导:初次使用或新控制系统需通过【Robot➔Configure...】菜单完成自动配置.
4.载入加工程序:打开由RoboDK CNC后处理器生成的CSV程序文件。
5.设备就绪检查:确保机器人已做好运行准备:驱动装置已打开,所需的运行模式和速度设置已设定。
6.启动程序执行:点击 Start执行程序。