自定义设置
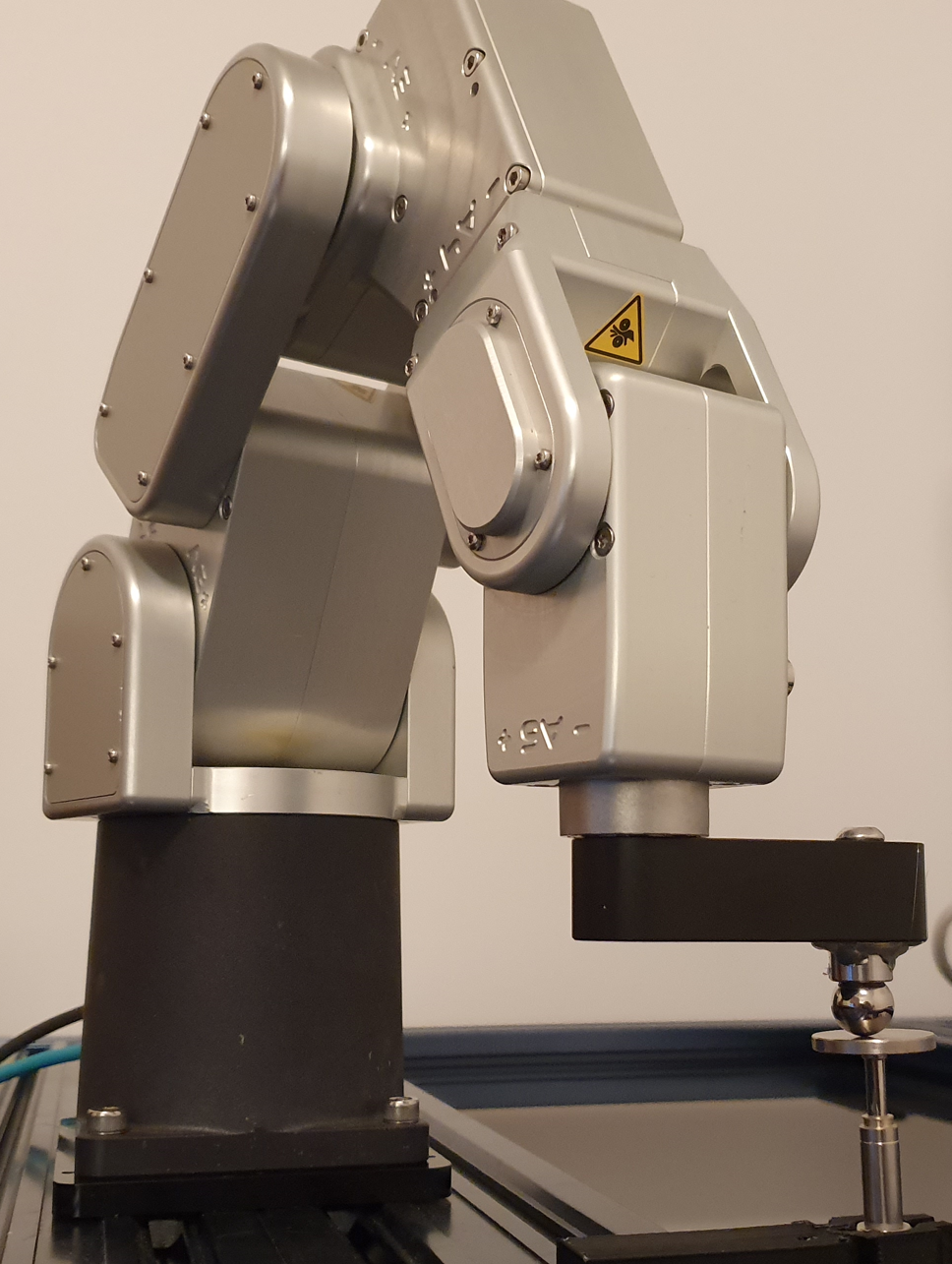
Important:强烈建议对可能与机器人或工具发生碰撞的任何物体进行单元负载3D建模。如果你使用的工具可能与机器人发生碰撞(或其他潜在碰撞),最好按照下一节所述进行自定义设置。
建模步骤:
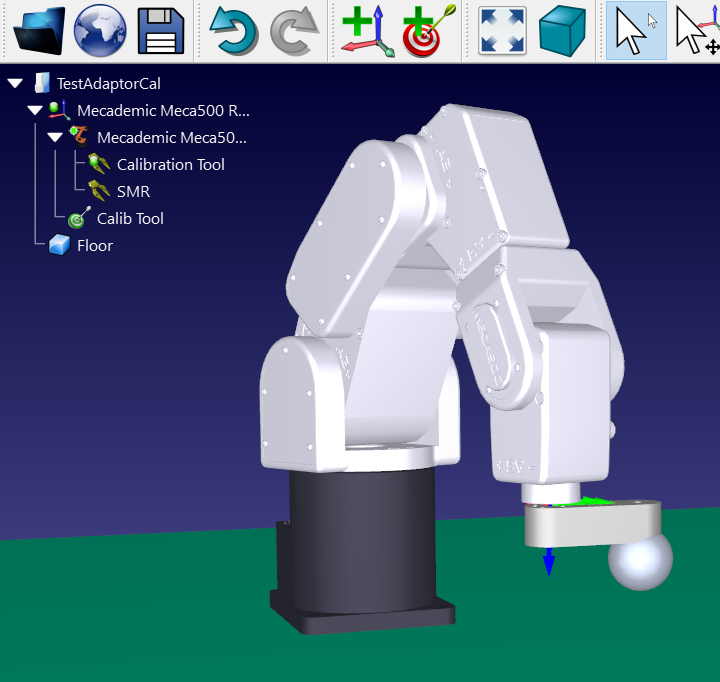
1.加载工具模型 并在 RoboDK 中创建工具。更多信息详见创建工具章节。
2.导入环境模型(支持 STEP、IGES、STL 等格式。更多信息详见入门指南章节。
Note:强烈建议对机器人单元进行正确建模,以避免碰撞。
Tip:若已知 TCP 的粗略估计值,可在 RoboDK 中预先设置,以 加速校准过程