校准结果
校准流程完成后,系统会跳转至
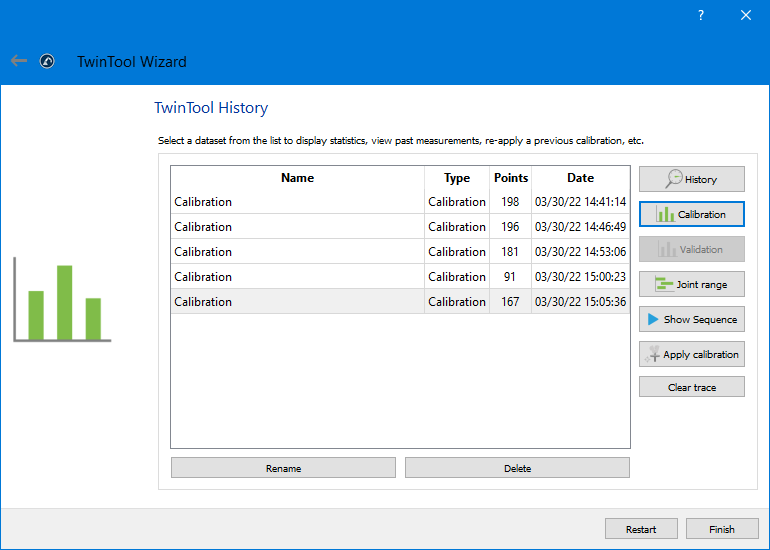
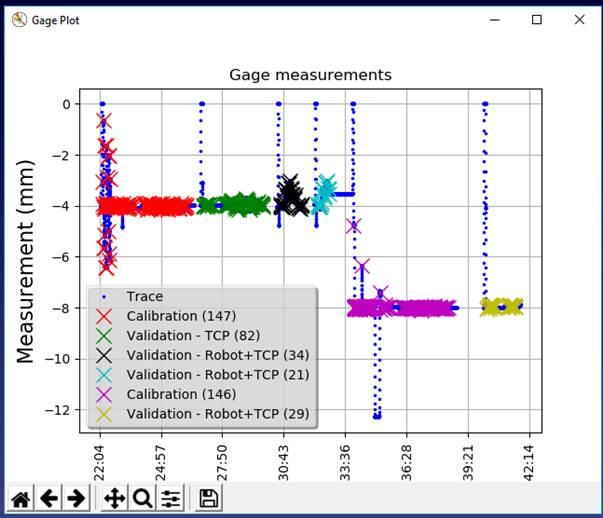
点击Calibration(校准)按钮,将显示校准结果图表。工具中心点(TCP)基于机器人标称运动学模型计算得出。
Note:如需重新校准(使用不同测量点),选择 TwinTool➔

Tip:为获得最佳精度,建议在不同机器人构型下进行校准。例如:首次校准使用 关节5负向(Flip位),
二次校准切换为 关节5正向(Non-Flip位)。
校准流程完成后,系统会跳转至
点击Calibration(校准)按钮,将显示校准结果图表。工具中心点(TCP)基于机器人标称运动学模型计算得出。
Note:如需重新校准(使用不同测量点),选择 TwinTool➔
Tip:为获得最佳精度,建议在不同机器人构型下进行校准。例如:首次校准使用 关节5负向(Flip位),
二次校准切换为 关节5正向(Non-Flip位)。