验证工具
在向导中选择

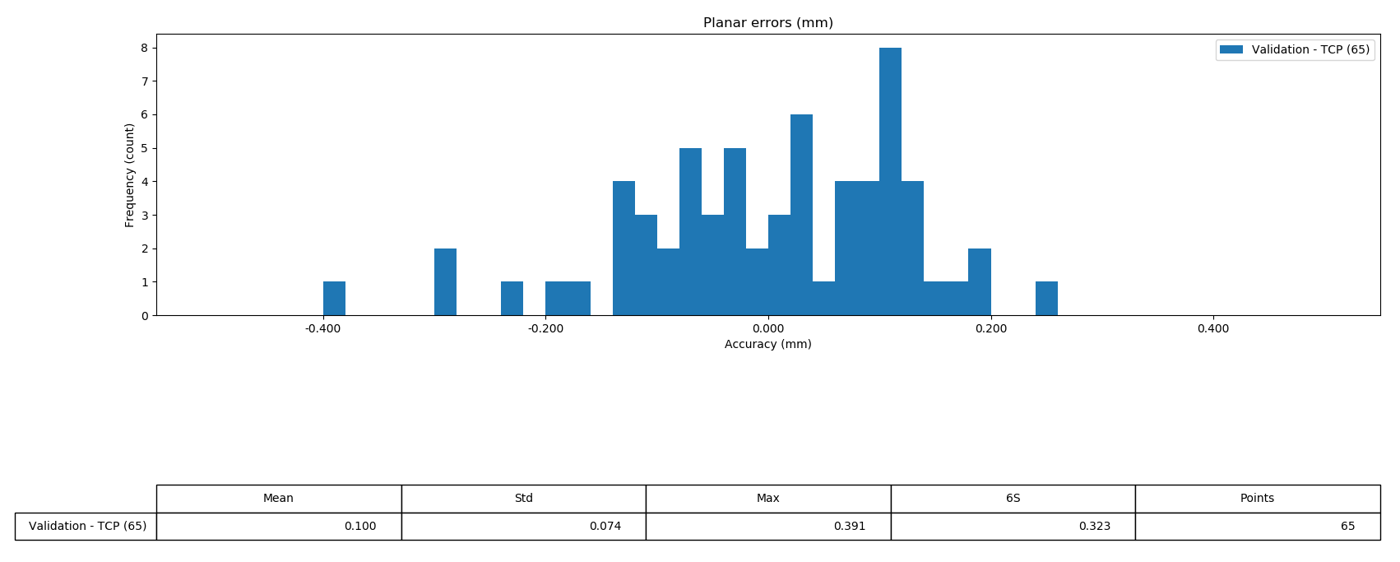
选择Validate(验证)查看误差摘要,统计数据反映传感器检测到的平面误差。
Tip:增加测量次数可显著提升精度,例如:首次使用 4 mm 测头接触距离,二次改用 8 mm。同一测点下切换机器人构型(如Flip/Non-Flip)。
在向导中选择
选择Validate(验证)查看误差摘要,统计数据反映传感器检测到的平面误差。
Tip:增加测量次数可显著提升精度,例如:首次使用 4 mm 测头接触距离,二次改用 8 mm。同一测点下切换机器人构型(如Flip/Non-Flip)。