完成校准后,可运行验证测试(可在传感器同一位置或不同位置进行)。
Important:不可合并不同传感器位置的校准数据,但同一位置的多组数据会自动整合用于计算。
在向导中选择 Validate(验证),系统将基于标定数据计算TCP(不涉及机器人本体标定)。然后,你将进入向导的
Validate(验证),系统将基于标定数据计算TCP(不涉及机器人本体标定)。然后,你将进入向导的 Analyze(分析)选项卡,显示TCP计算结果及误差统计。
Analyze(分析)选项卡,显示TCP计算结果及误差统计。
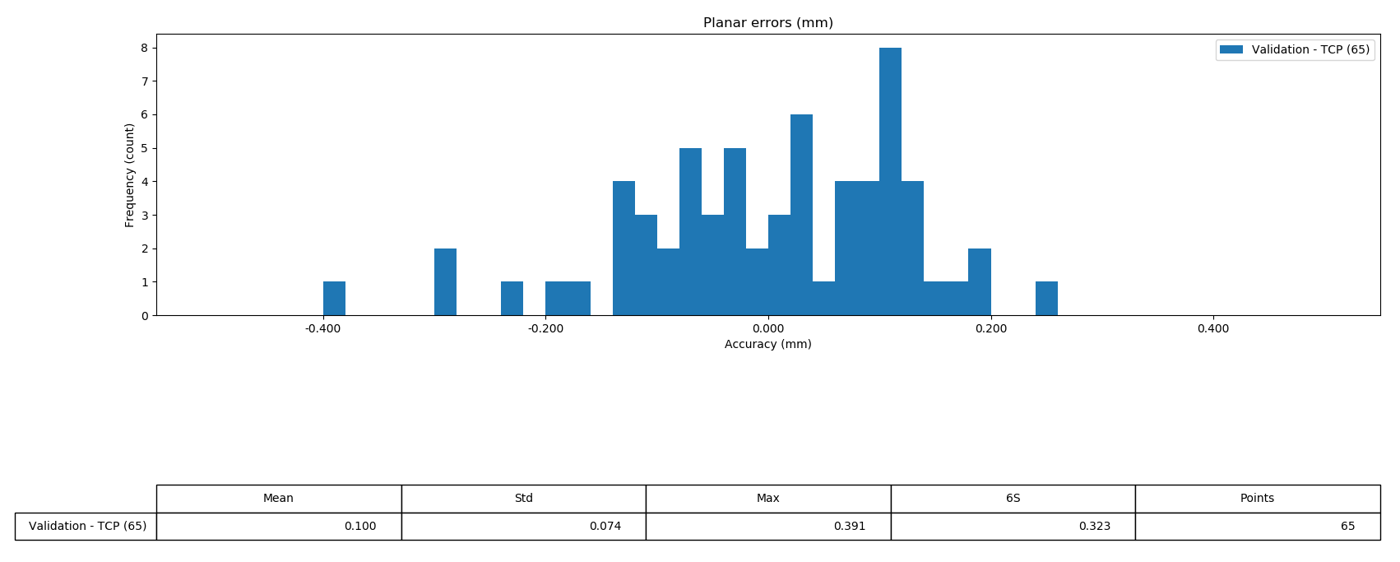
选择Validate(验证)查看误差摘要,统计数据反映传感器检测到的平面误差。
Tip:增加测量次数可显著提升精度,例如:首次使用 4 mm 测头接触距离,二次改用 8 mm。同一测点下切换机器人构型(如Flip/Non-Flip)。