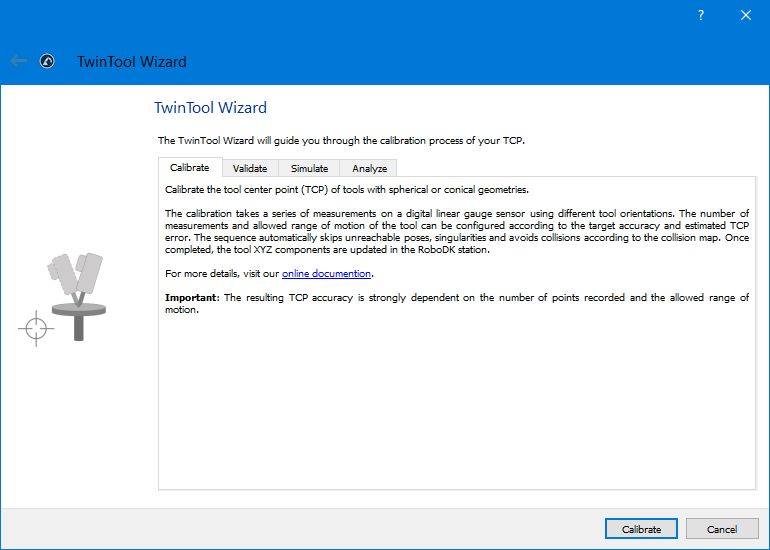
校准向导
启动校准流程:点击TwinTool➔
向导将引导你完成


Important:首次校准前,建议先运行仿真模式(实际路径可能自动调整)。
Important: 模拟序列可能与用于校准或验证的实际序列不一致。机器人路径会自动调整。
Tip:保存机器人在传感器上的关节目标位置(避免使用 "Calib Target" 命名,以便复用)。
Tip:若已有较准确的 TCP 估计值,可设置 Estimated tool error ≤ 5 mm,以加快校准。
Tip:调整 Z/XY 方向的关节范围,可改变机器人的运动范围。