RoboDK TwinTool
简介
通过RoboDK TwinTool 校准功能,你可以自动校准工具中心点 (TCP)。工业机器人具有极高的重复定位精度,但并不精确。因此,通过机器人和工具校准可提升工业机器人的绝对精度。未经校准的情况,机器人精度高度依赖机器人的品牌和型号。

RoboDK TwinTool 可用于校准和验证刀具中心点 (TCP) 。能够精确校准以下几何形状工具的TCP。
1.球形工具➔校准工具秋心位置
2.锥形工具➔校准工具尖端位置
系统要求
需安装RoboDK TwinTool 插件,并配备兼容传感器以实现自动化工具校准
请确保满足以下条件:
1.一台或多台机器人机械臂。
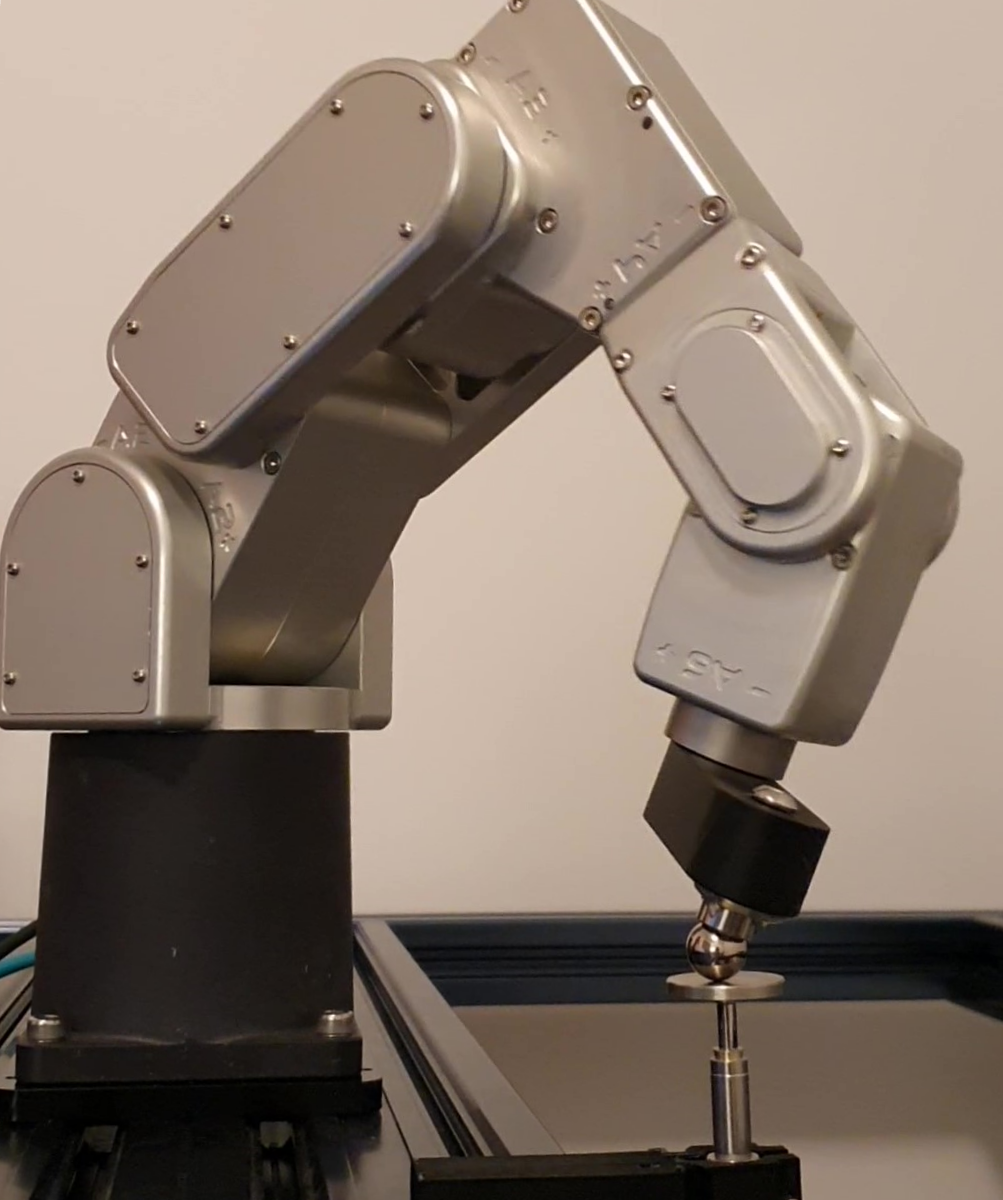
2.兼容的接触式侧头(如 LVDT 线性测头或千分表)。
3.已安装 RoboDK 软件,且持有自动化校准功能授权许可证。
4.机器人控制器需要配备兼容的机器人驱动器。
5.安装 RoboDK TwinTool 插件:
a.下载 RoboDK TwinTool 小程序(联系 RoboDK 获取下载链接)
b.双击安装文件,并在RoboDK 中打开。
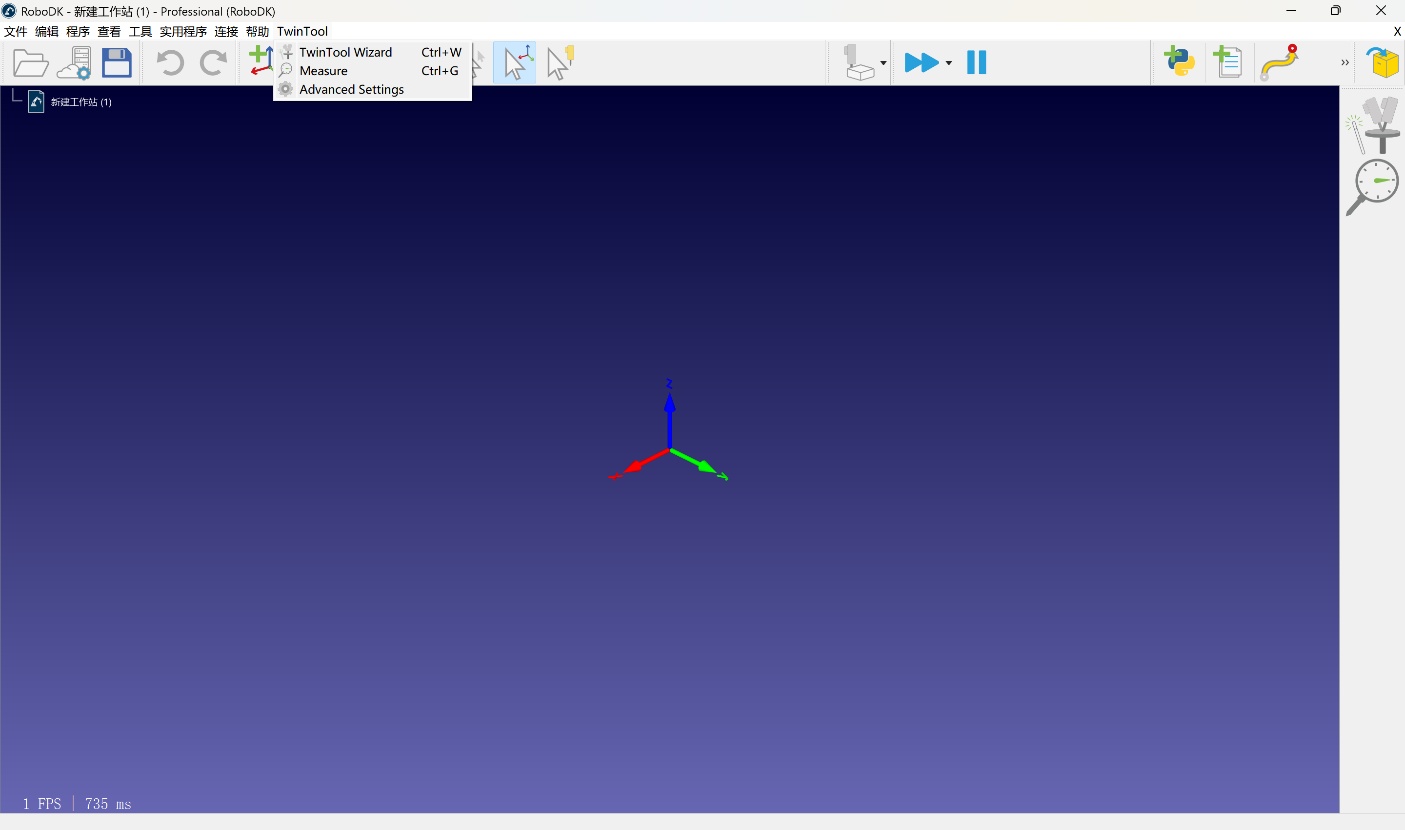
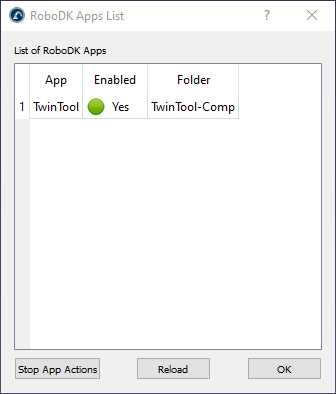
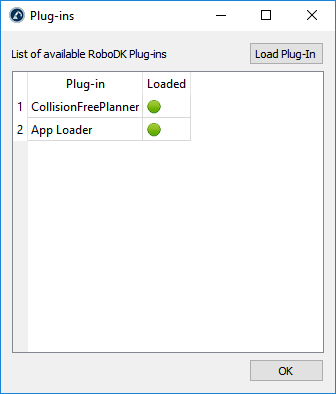
c.点击菜单栏的工具➔ 插件,双击TwinTool即可显示工具栏。
若未显示插件,则应关闭 RoboDK,然后以管理员权限重新启动 RoboDK,以正确安装该程序。
Note:使用RoboDK 插件需要启用App Loader拓展模块。双击.rdkp 文件时会自动加载。若未生效,可通过工具➔加载插件中加载应用程序加载器插件。
Important:TwinTool 小程序会自动下载和安装依赖项,这需要激活互联网连接。不过,也可以从另一台计算机下载这些依赖项。
Note:TwinTool 菜单和工具栏可能会自动显示。你也可以通过选择工具➔插件, 并双击应用程序的启用标签来显示或隐藏TwinTool 程序(或其他应用程序)。
线性测头传感器
RoboDK TwinTool 支持多种线性测头传感器,包括 Keyence(基恩士)、Mitutoyo(三丰)、Sylvac 等品牌。通信协议可支持 USB、Ehternet/IP 和 RS232等。工业级线性测头的参考价格为 1,500.00 欧元。
线性测头传感器的精度应为 0.005 毫米或更高,行程大于等于10 毫米。建议测量频率为每秒 50 个采样点或更高。RoboDK 不提供或销售该传感器,需自行联系本地供应商购买,以获得使用 RoboDK TwinTool 所需的传感器。
Keyence(基恩士)线性测头配置示例:
●GT2-P12 - 笔式测头
●GT2-UB1 - USB 连接单元
●OP-87716 - 延长线
●OP-76875 -推荐安装支架
●25 mm 平面测头(M2.5×0.25 螺纹,需单独采购)
Mitutoyo(三丰)线性测头配置示例:
●542-191 - LG 100 测头
●542-081A - EJ 计数器 + AC 适配器
●21HZA149 - USB 接口(也支持 RS232)
●25 mm 平面测头(M2.5×0.25 螺纹,需单独采购)
校准设置
使用 TwinTool 校准 TCP 前,需在 RoboDK 中加载机器人,并确保传感器和机器人已连接。建议建模整个工作站(包括工具和障碍物),以自动避免碰撞。
1.加载机器人:
a.选择文件➔ 打开机器人库。在线资源库会在浏览器窗口弹开。
b.使用过滤器查找你需要的机器人。
c.点击"打开…",在 RoboDK 工作站中加载机器人。
d.或者,直接从资源库下载机器人文件https://robodk.com.cn/cn/library,然后用 RoboDK 打开文件(.robot 文件)。
2.连接传感器:
a.将传感器连接至电脑。
b.点击TwinTool➔
c.确保传感器测量稳定。
Note:若首次连接失败,可在后续步骤中调整连接设置并保存。
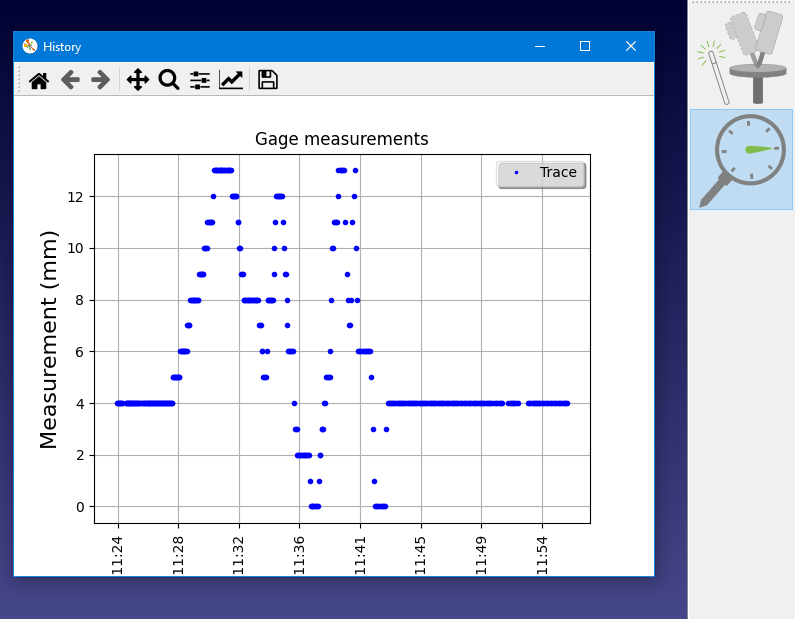
Important:确保校准装置足够稳固,避免振动影响测量(如行走带来的振动)。测试方法:将机器人放置在传感器上,轻触或走动,测量波动应 < 0.005 mm。若波动过大,需加固传感器或机器人底座。
3.连接机器人:
a.选择连接➔ 连接机器人。
b.输入机器人 IP 和端口。
c.选择连接。
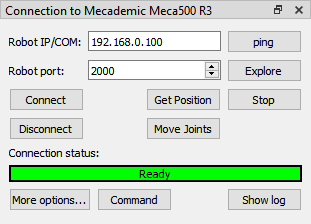
Note: 部分机器人控制器需特殊设置。更多信息详见机器人驱动器章节。
4.在机器人连接面板点击 获取位置,更新机器人在 RoboDK 中的实时位姿。
自定义设置
Important:强烈建议对可能与机器人或工具发生碰撞的任何物体进行单元负载3D建模。如果你使用的工具可能与机器人发生碰撞(或其他潜在碰撞),最好按照下一节所述进行自定义设置。
建模步骤:
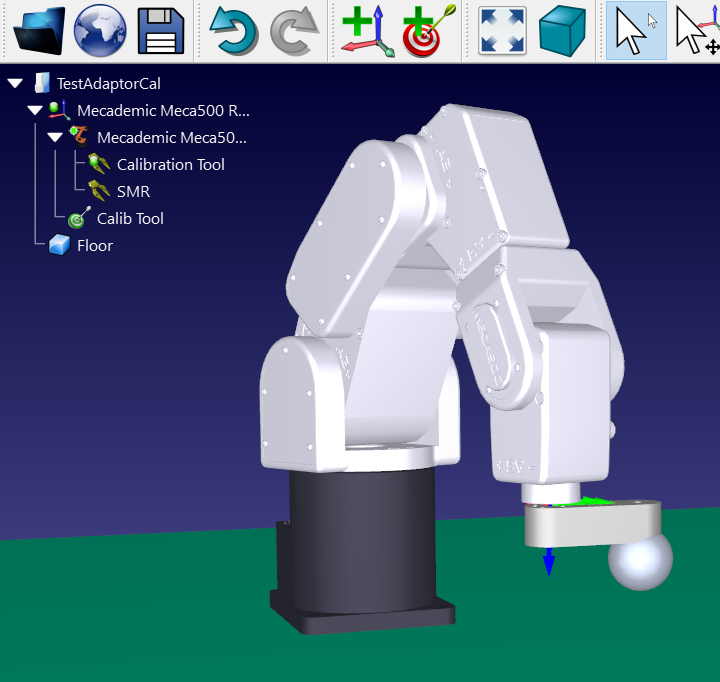
1.加载工具模型 并在 RoboDK 中创建工具。更多信息详见创建工具章节。
2.导入环境模型(支持 STEP、IGES、STL 等格式。更多信息详见入门指南章节。
Note:强烈建议对机器人单元进行正确建模,以避免碰撞。
Tip:若已知 TCP 的粗略估计值,可在 RoboDK 中预先设置,以 加速校准过程
校准向导
启动校准流程:点击TwinTool➔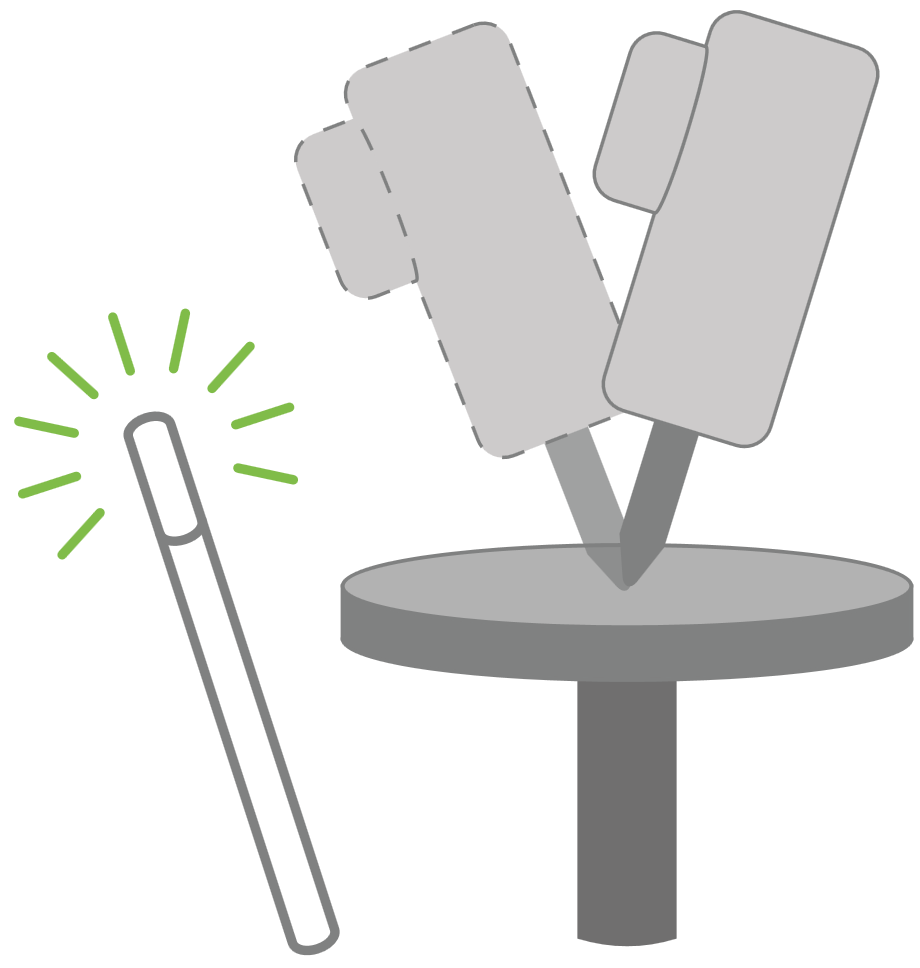
向导将引导你完成


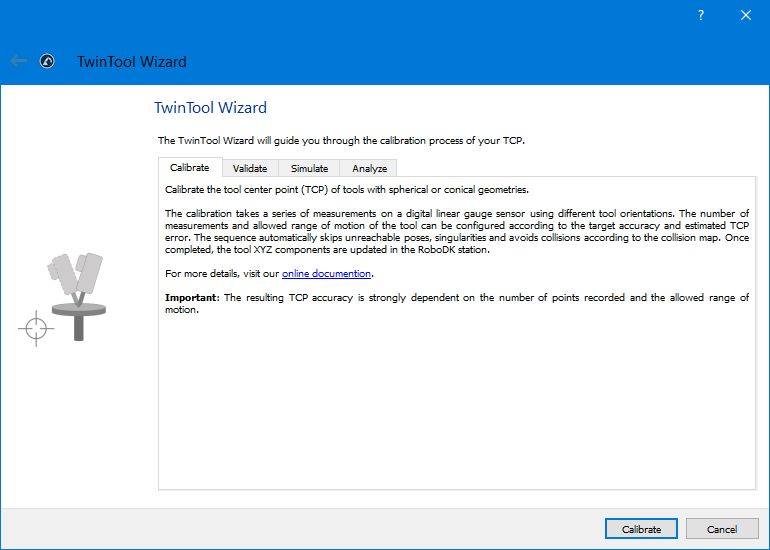
Important:首次校准前,建议先运行仿真模式(实际路径可能自动调整)。
Important: 模拟序列可能与用于校准或验证的实际序列不一致。机器人路径会自动调整。
Tip:保存机器人在传感器上的关节目标位置(避免使用 "Calib Target" 命名,以便复用)。
Tip:若已有较准确的 TCP 估计值,可设置 Estimated tool error ≤ 5 mm,以加快校准。
Tip:调整 Z/XY 方向的关节范围,可改变机器人的运动范围。
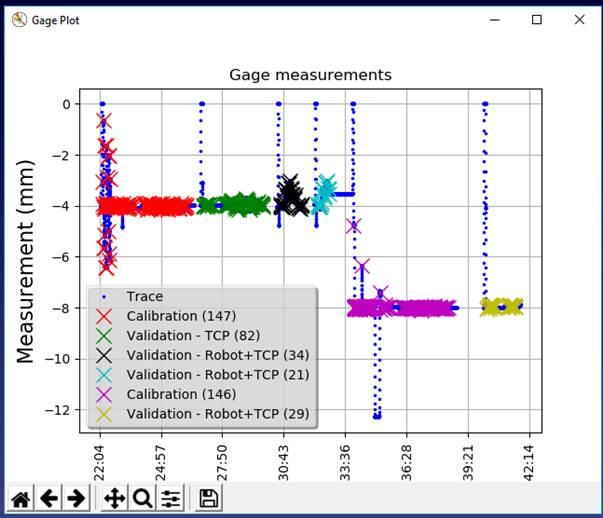
校准结果
校准流程完成后,系统会跳转至
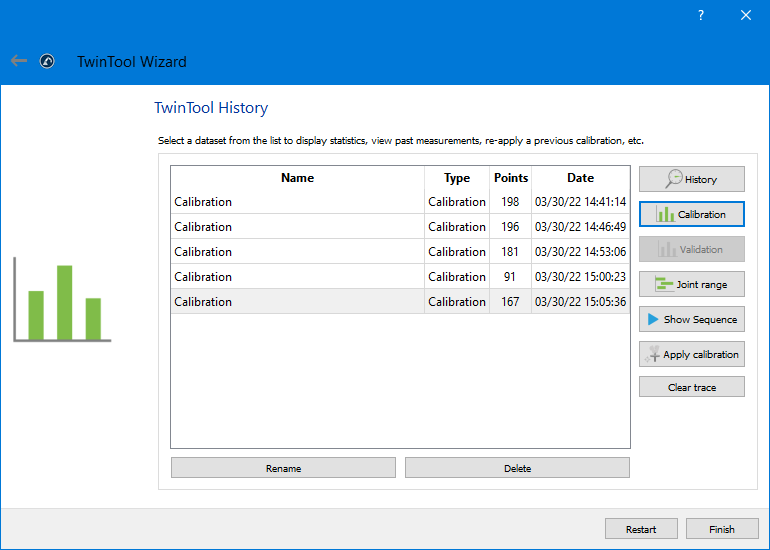
点击Calibration(校准)按钮,将显示校准结果图表。工具中心点(TCP)基于机器人标称运动学模型计算得出。
Note:如需重新校准(使用不同测量点),选择 TwinTool➔

Tip:为获得最佳精度,建议在不同机器人构型下进行校准。例如:首次校准使用 关节5负向(Flip位),
二次校准切换为 关节5正向(Non-Flip位)。
验证
完成校准后,可运行验证测试(可在传感器同一位置或不同位置进行)。
Important:不可合并不同传感器位置的校准数据,但同一位置的多组数据会自动整合用于计算。
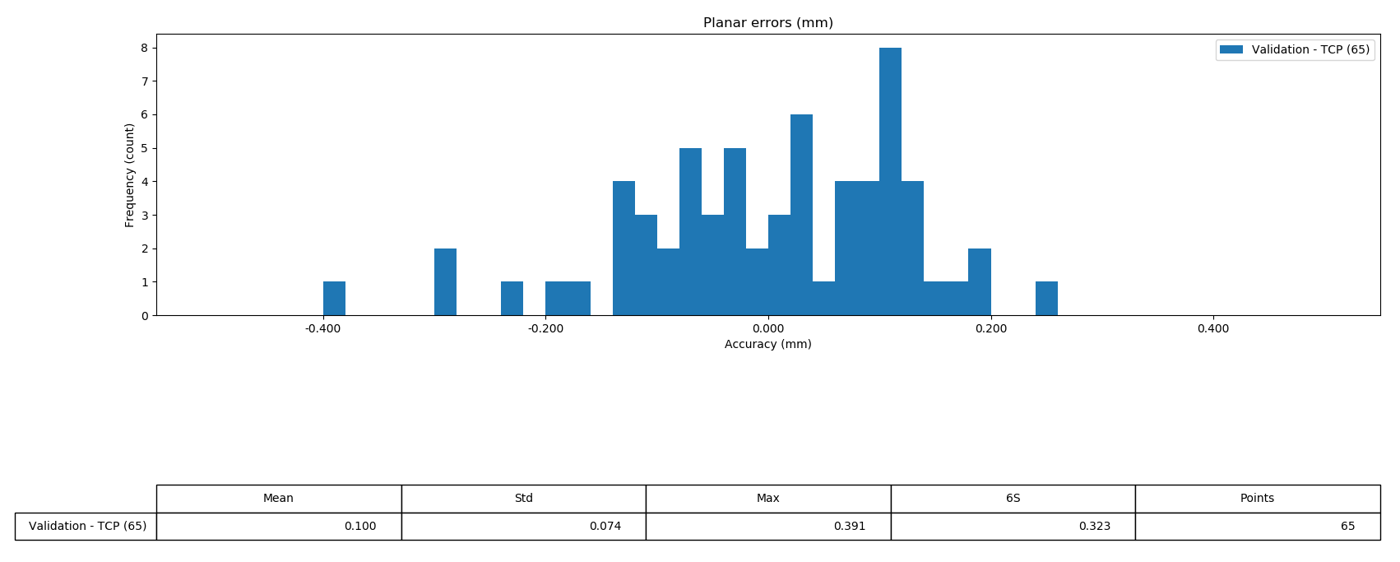
验证工具
在向导中选择
选择Validate(验证)查看误差摘要,统计数据反映传感器检测到的平面误差。
Tip:增加测量次数可显著提升精度,例如:首次使用 4 mm 测头接触距离,二次改用 8 mm。同一测点下切换机器人构型(如Flip/Non-Flip)。
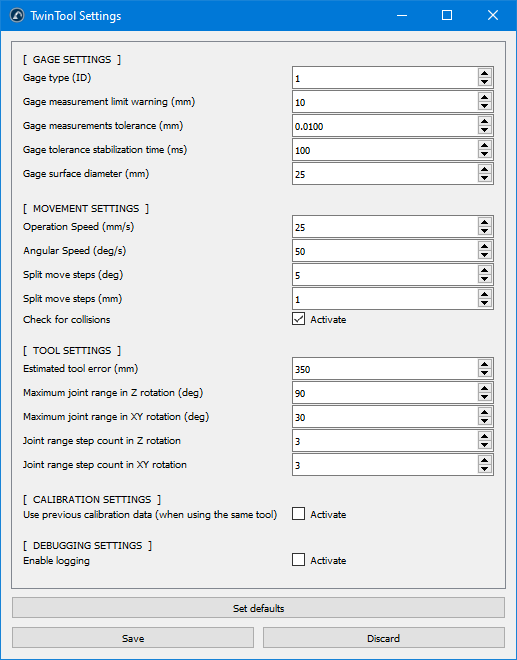
设置
通过Advanced Settings(高级设置) 可自定义标定流程并测试机器人精度。
校准设置
操作路径:点击TwinTool➔ Advanced Settings(高级设置),查看完整参数列表(多数参数已通过向导预设)