机器人校准
机器人校准分为 4 个步骤。每个步骤都需要进行一组测量。这四个步骤必须依次进行:
1.基础参考测量(3 分钟)。
2.工具参考测量(3 分钟)。
3.校准测量(7 分钟,60 次测量)。
4.验证测量(7 分钟,60 次测量)。
以下视频展示了如何在 20 分钟内完成校准: https://youtu.be/Htpx-p7tmYs。验证测量(步骤 4)并不是校准机器人的必备条件,但它为精度结果提供了一个客观的视角。还可以查看在一个区域校准机器人和在另一个区域验证机器人的影响。
为四组测量中的每一组选择 "测量 "按钮。这将打开一个新窗口,允许进行新的测量,以及以文本文件(csv 或 txt 格式)导入和导出现有测量值。
默认情况下,机器人和测量系统通过连接的机器人自动同步。如果没有机器人驱动器,仍可通过生成机器人程序来执行机器人校准,该程序将在示教器上提示用户进行手动同步。
1.取消选中自动同步。
2.点击 "制作机器人程序 "按钮。
3.使用合适的后处理器生成机器人程序。
测量底座
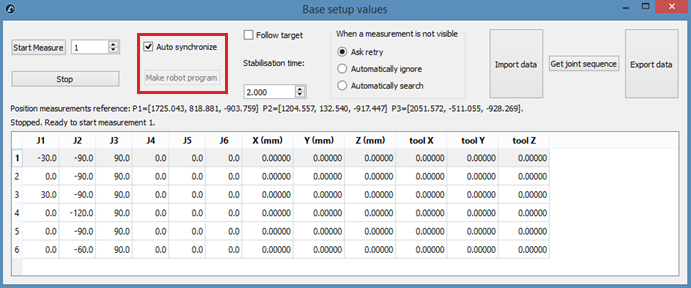
如果在所有 6 次测量中都对同一目标进行测量,则可以在工具法兰的任何位置执行这些测量。要开始测量,请在 "基础设置 "部分选择 "测量"。将打开以下窗口。然后,选择 "开始测量",机器人将按顺序完成预定测量。
小贴士双击一个测量点,继续从该位置开始测量。

测量完成后关闭窗口,测量参考坐标系将相对于机器人基本坐标系进行更新。如果您没有选择任何参考坐标系,可以添加一个参考坐标系(选择程序➔ 添加参考坐标系),并将其置于机器人基本参考坐标系之下(在项目树中拖放)。

摘要将显示机器人参考坐标系相对于校准参考坐标系的位置和方向([x,y,z,w,p,r] 格式,单位为毫米和弧度)。
完成这一步后,您就可以在 RoboDK 中实时准确地显示追踪仪相对于机器人的工作空间。
测量工具
和上一节一样:在工具设置部分选择测量。将打开以下窗口。选择 "开始测量",机器人将按顺序完成计划的测量。双击某个测量点,可从该位置继续测量。
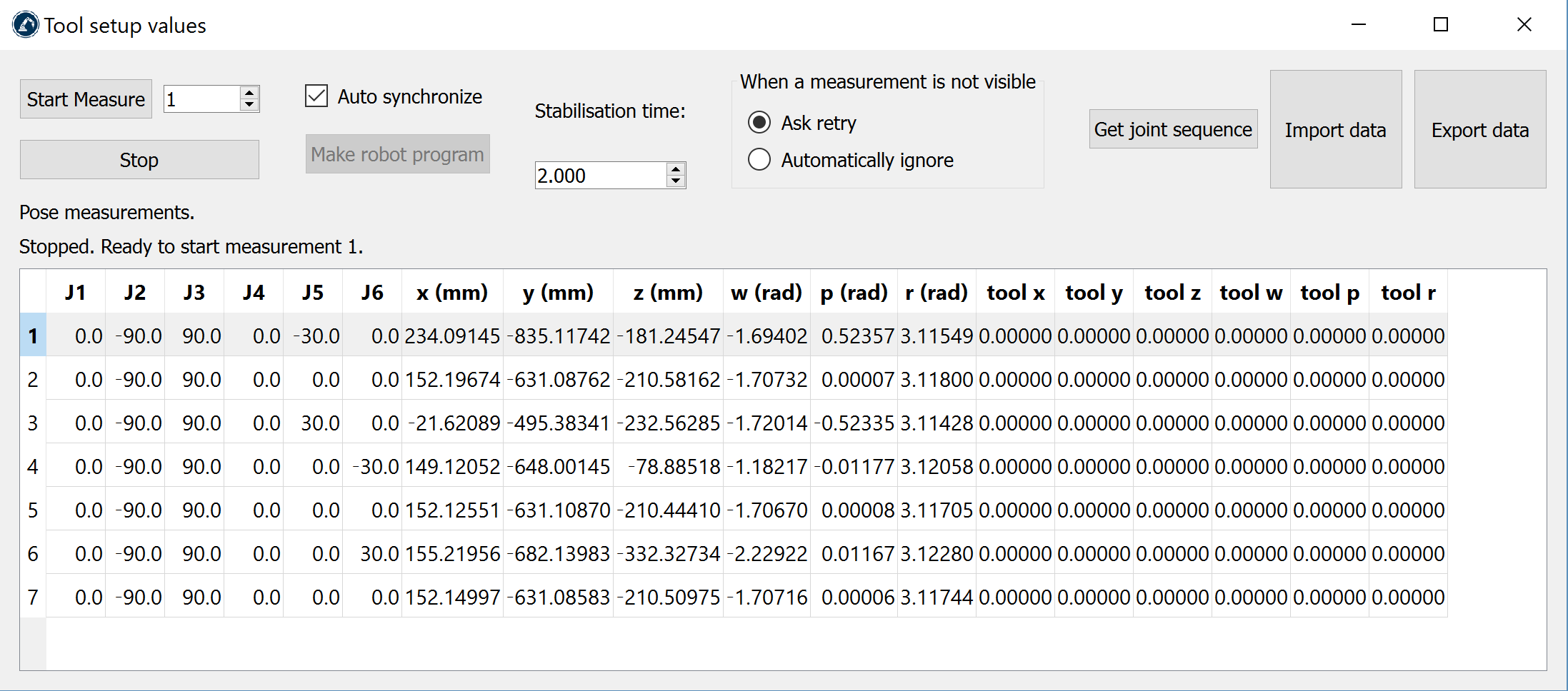
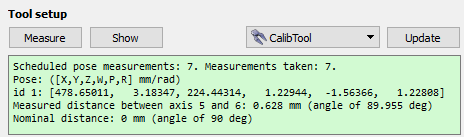
程序完成后,摘要将显示校准后的 TCP(位置和方向)。TCP 的定义(下图中为 "主轴")将自动更新。如果没有选择任何 TCP,可以添加一个新的 TCP(选择 "程序➔添加空工具"),然后选择 "重新计算"。
校准
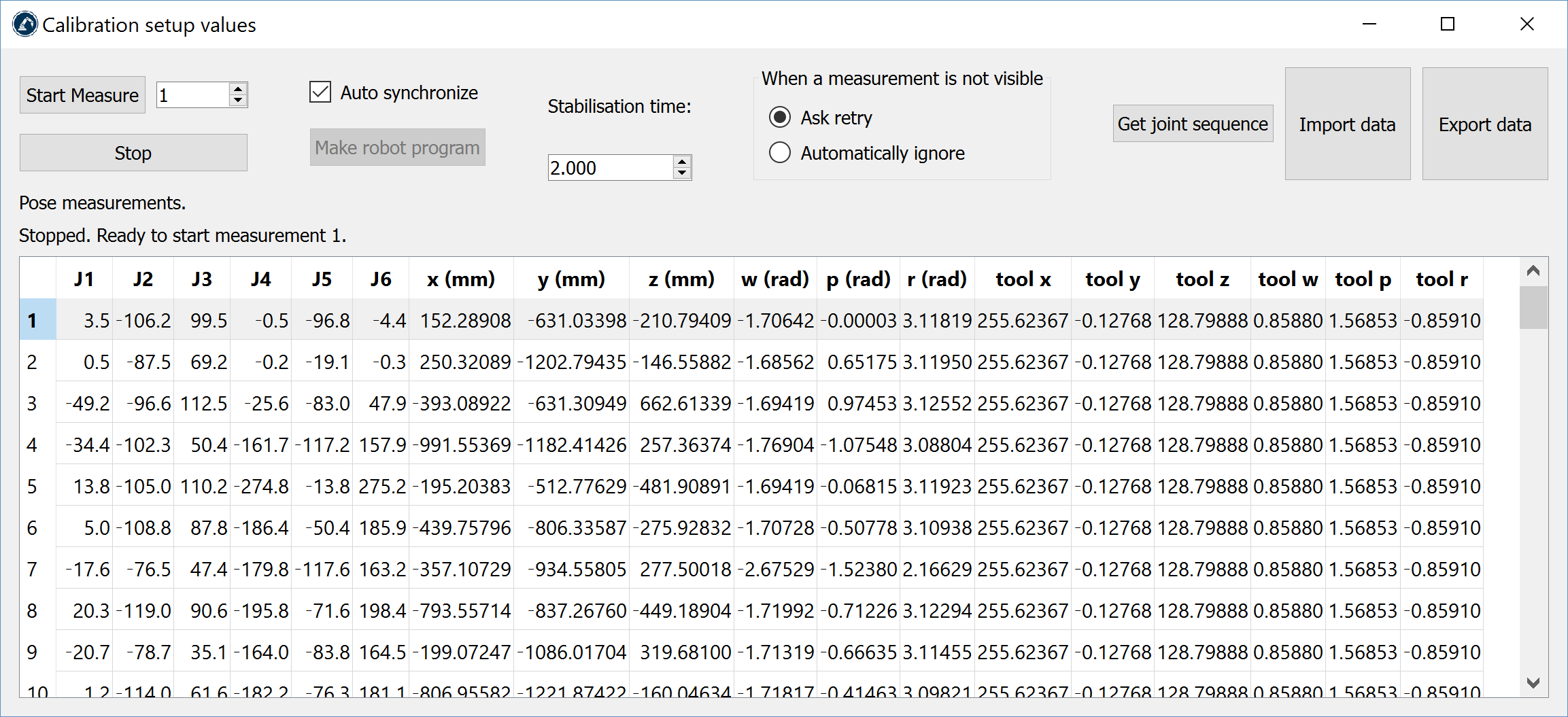
在校准部分选择测量,打开机器人校准测量窗口。然后,选择 "开始测量",机器人将按顺序完成计划的测量。双击某个测量点,即可从该位置继续测量。
测量完成后关闭窗口。机器人将自动校准,如果没有问题,它会显示以下信息。
最后,绿色屏幕会显示一些有关校准测量的统计数据,以及这些测量的精度提高了多少。
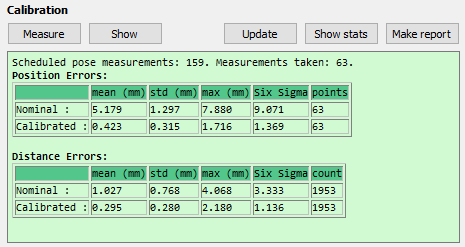
验证
您不应该使用校准机器人时的测量结果来验证机器人的精度,因此,建议您进行额外的测量来验证精度(对精度结果有更客观的观点)。
必须按照相同的校准程序进行验证测量。摘要将显示验证统计数据。更多信息,请参阅 "结果 "部分。