连接机器人
要正确设置与RoboDK的通信,需要机器人的IP(或RS232连接的COM端口号)。按照以下步骤验证与机器人的通信:
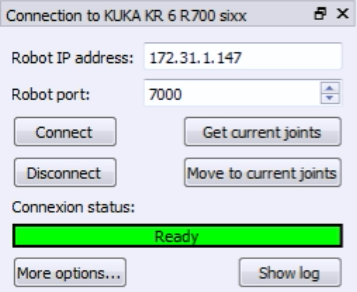
1.在菜单栏选择:连接➔连接机器人。软件左边界面出现一个连接机器人窗口。
2.输入机器人的IP和端口(如果通过RS232连接,则设置COM端口)。
3.单击按钮:连接。
4.若出现连接问题,请参阅附录。
Note:更多信息请参见程序章节。
如果连接成功,你将看到一条绿色信息,显示"Ready"。若选择获取位置,虚拟机器人的位置应与真实机器人的位置保持一致。或选择关节运动,那么机器人会移动到模拟器中的当前位置。你可以暂时关闭此侧窗口,连接将保持激活状态。
Important: 若在窗口处选择获取位置和关节运动,虚拟机器人的位置应与真实机器人的位置完全一致。否则,某些机器人设置可能不正确。可能需要调整某些机器人参数(如安川(Motoman)机器人的脉冲/度数比)。