探测参考坐标系
首先需要建立两个模型:工具模型和参考坐标系模型。每个模型都是由一组靶标点(X,Y,Z坐标)构成的集合,这些坐标值是相对于模型自身坐标系(工具坐标系或基座坐标系)定义的。
定义工具模型和基座模型需重复以下步骤:
1.通过选择"连接➔连接Creaform C-Track光学坐标测量机"与VXElements建立连接。
2.点击"连接"并等待状态显示为"Ready"。确保根据VXElements要求完成跟踪仪和HandyProbe测头的校准,同时确认已启用Creaform提供的VXTrack和VXModel软件模块。
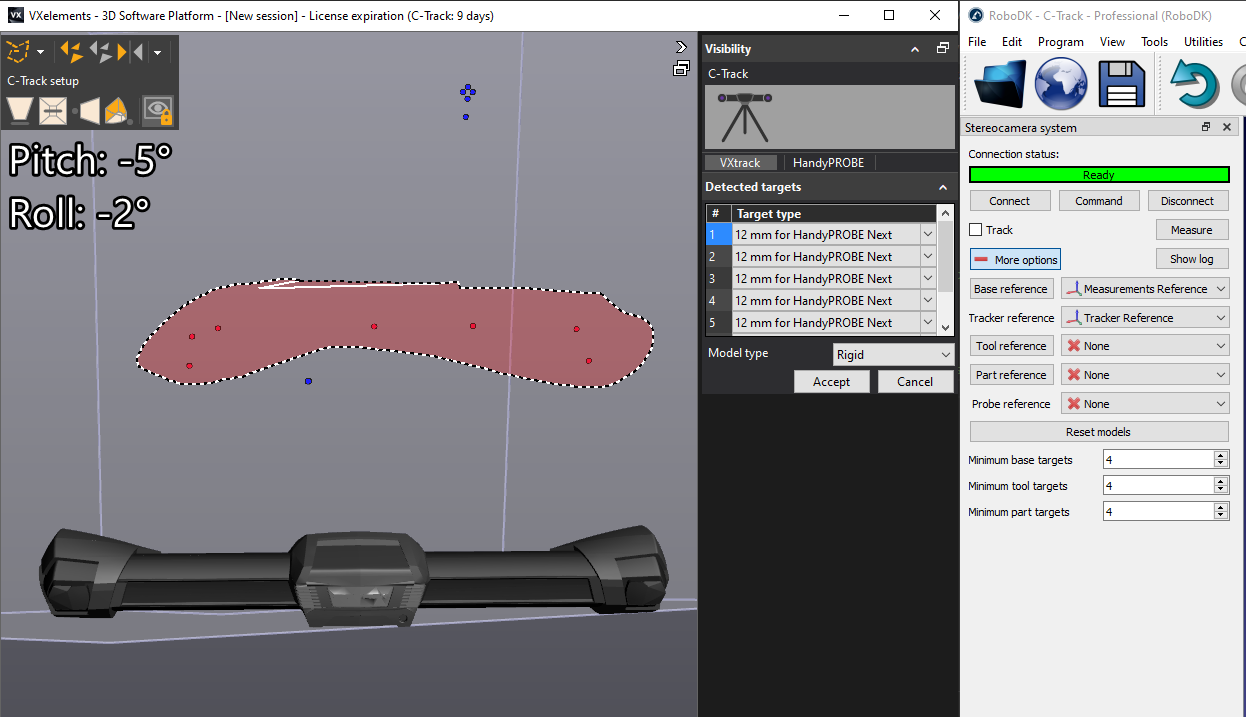
3.在RoboDK中选择"基座参考系"。VXelements将自动打开并显示可见的定位靶标。此时应选择所有静态参考点,务必排除可能移动的点。

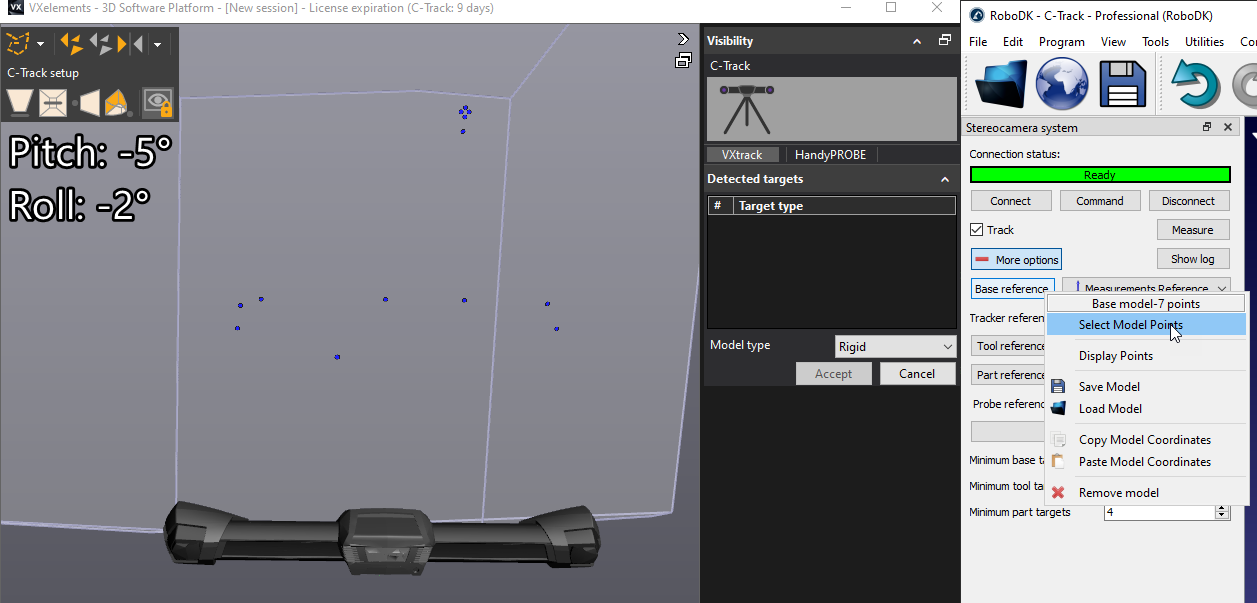
Tip:按住 CTRL 键可选择一组目标。
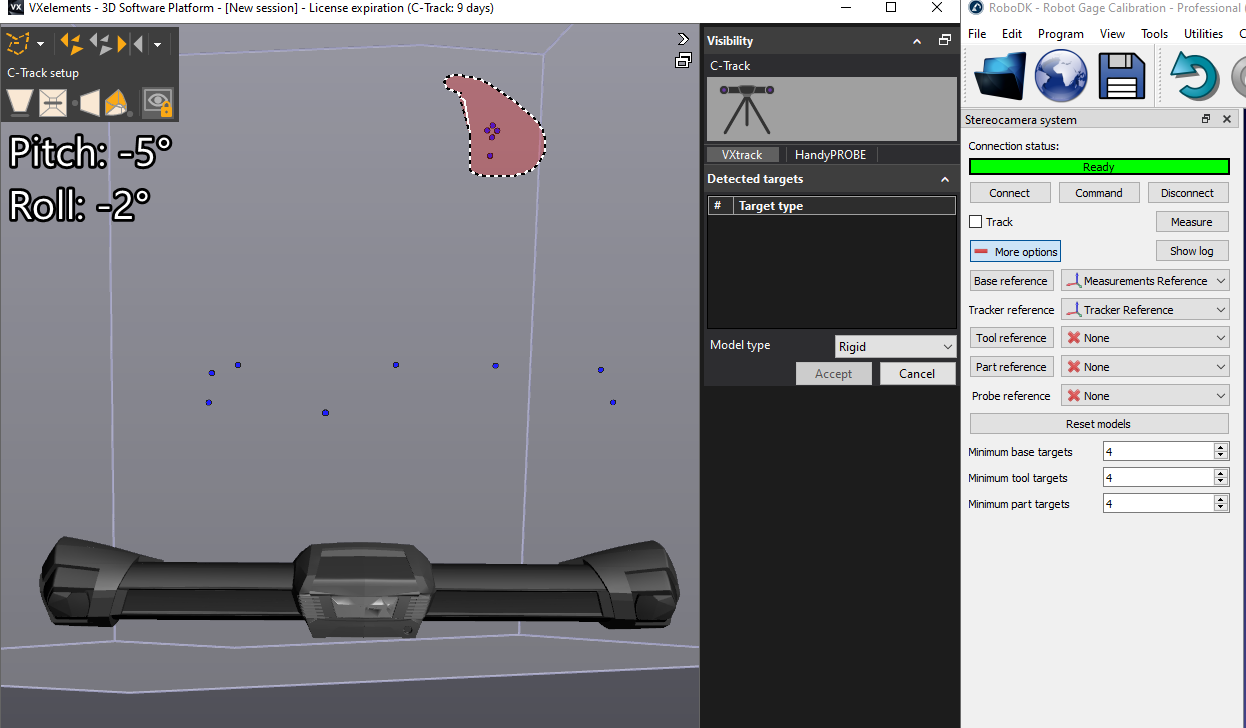
4.在RoboDK中选择"工具参考系",重复上述操作选择构成工具模型的靶标点。
Note:你可以选择将模型导入或导出为文本文件。你应该在文本文件中看到目标为 XYZ 坐标列表。你也可以在 RoboDK 中直观地看到这些点,方法是右键单击 "基本参考 "或 "工具参考 "按钮,然后选择 "显示点"。
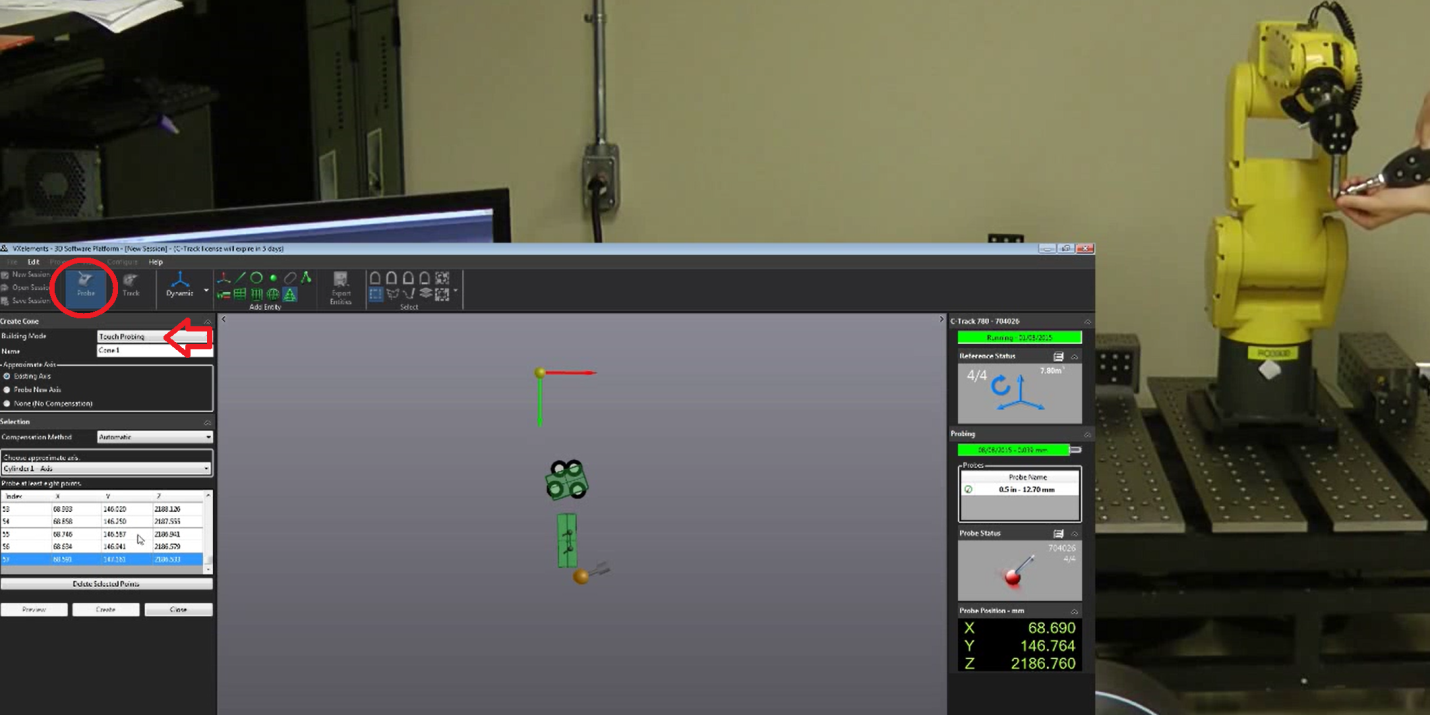
Tip:参考坐标系或工具中心点(TCP)可基于物体特征进行精确定位。如需确保工具特征相对于机器人法兰的精确位置(例如使工具Z轴与主轴基准圆柱轴线对齐),建议执行此可选步骤:使用HandyProbe测头在VXelements虚拟会话中采集特征数据。当前模型需设为定位模型,才能基于特征(点、线、面、圆柱、圆锥等)建立参考坐标系。
Note:对于复杂被测物体,可采用MaxShot设备或摄影测量服务建立模型,此方法可获得更高精度。