零点复位轴
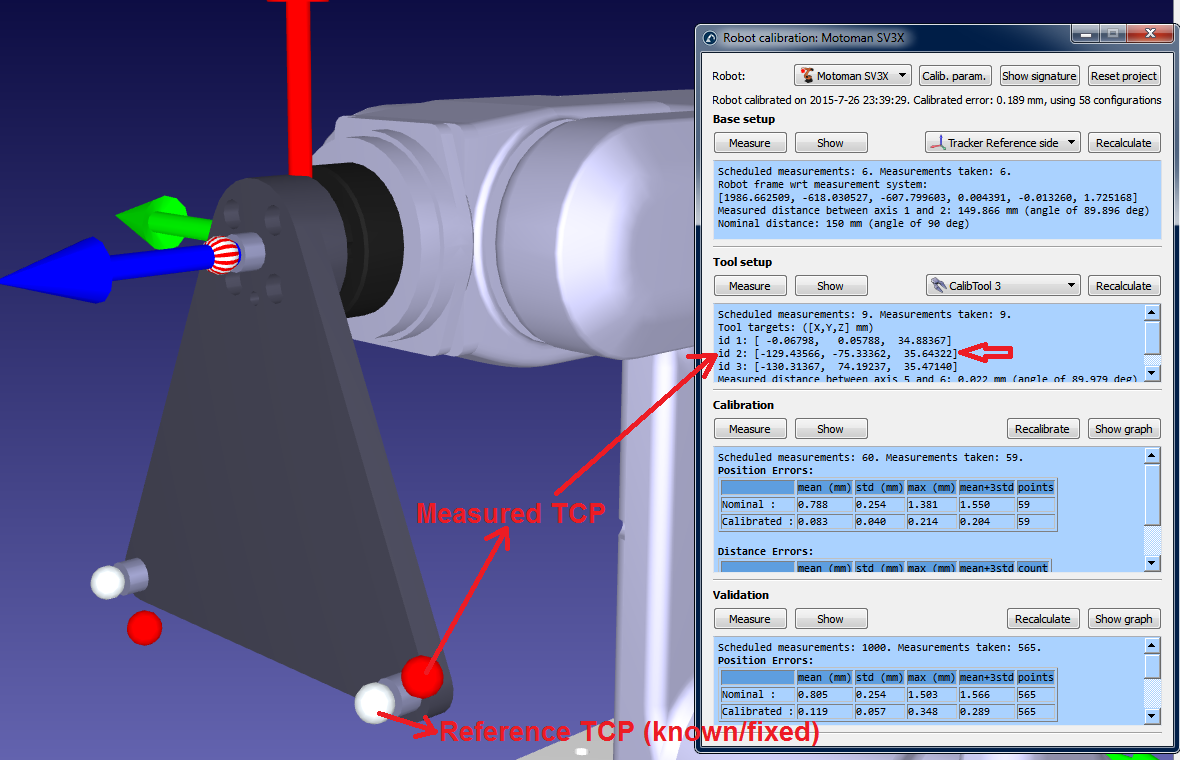
你必须使用参考目标来正确设置轴6的"原点"位置。角度偏置将是为使测量的 TCP(X、Y、Z)与已知 TCP 参考值达到最佳匹配所需的绕工具法兰 Z 轴的旋转。测量的 TCP(见下图)是校准程序第二步中测量的 TCP 之一。参考 TCP 是与所使用校准工具的其中一个 TCP 相对应的已知参考。
理想情况下,基准 TCP 必须由坐标测量机相对于工具法兰进行测量(最好是机器人工具法兰的复制品)。或者,也可以使用新的机器人首次测量(校准程序的第二步)TCP,并将一个测得的 TCP 作为基准。使用镙丝钉和/或适当的工具法兰作为基准非常重要,可确保末端效应器始终放置在相同的位置。