Navigation offcanvas
在主菜单选择实用程序➔校准参考系(用户框架),既可校准坐标系。系统支持多种坐标系设定方式,如图所示案例采用三点定位法:第1、2点确定X轴方向,第3点确定Y轴正向。
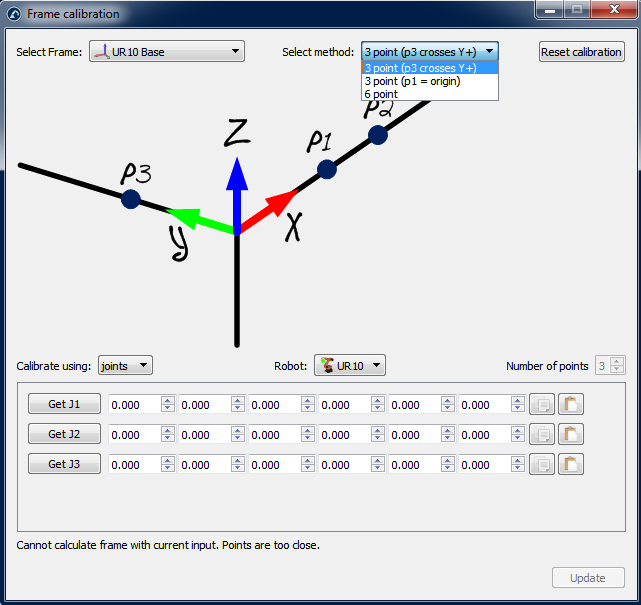
Important:建议在校准前切换至关节目标模式并启用机器人精度补偿功能,借助机械臂自身定位精度可提升坐标系定义准确度。
Note:更多有关参考坐标系校准的信息,请参阅定义参考坐标系章节。
Navigation offcanvas
在主菜单选择实用程序➔校准参考系(用户框架),既可校准坐标系。系统支持多种坐标系设定方式,如图所示案例采用三点定位法:第1、2点确定X轴方向,第3点确定Y轴正向。
Important:建议在校准前切换至关节目标模式并启用机器人精度补偿功能,借助机械臂自身定位精度可提升坐标系定义准确度。
Note:更多有关参考坐标系校准的信息,请参阅定义参考坐标系章节。