校准结果
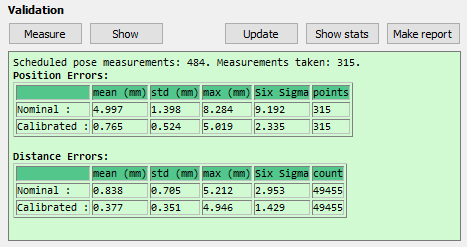
校准完成后,你可以通过阅读 RoboDK 提供的统计数据来分析精度的提高情况。要显示这些统计数据,请打开机器人校准窗口(双击图标 "机器人校准")。校准部分的汇总窗口将显示校准前的误差(标称运动学)和校准后的误差(校准运动学)。提供两个台面,一个显示位置误差统计,另一个显示距离误差:
●位置误差:位置误差是指机器人相对于参考坐标系所能达到的一点精度。
●距离误差距离误差通过测量两点间的距离误差获得。将机器人看到的两点之间的距离(通过校准运动学获得)与测量系统看到的距离(物理测量)进行比较。所有组合都会考虑在内。如果进行了315 次测量,则距离误差值为 315x315/2= 49455。
提供的统计数据包括平均误差、标准偏差 (std) 和最大误差。此外,还提供了平均值加上标准偏差的三倍,这相当于 99.98% 测量的预期误差(如果考虑到误差服从正态分布)。
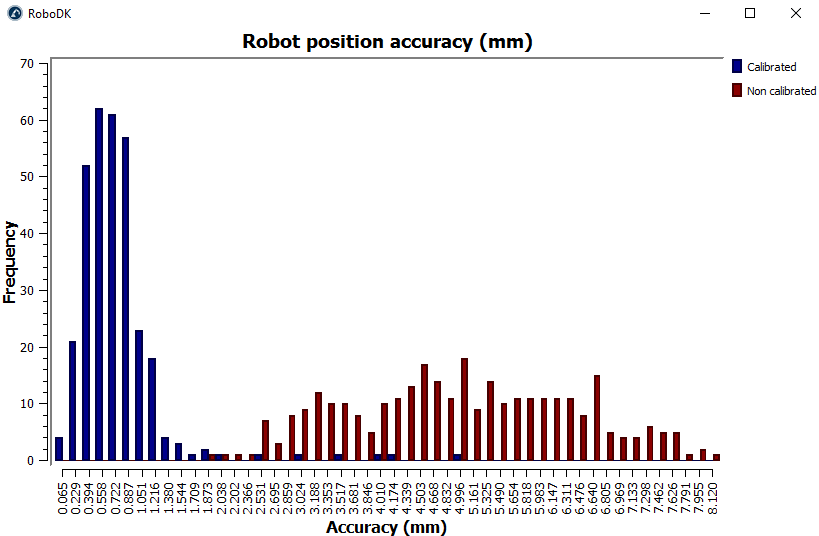
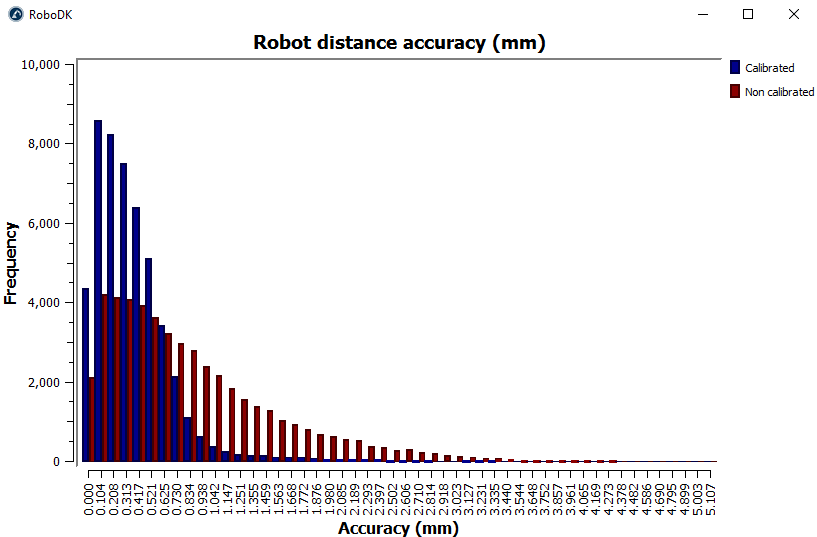
选择"显示统计",两个直方图将显示校准前后的误差分布,一个直方图显示位置精度,另一个显示距离精度。以下图像与本示例中使用的315 次验证测量相对应。
最后,选择 "制作报告",然后将生成一份包含本节信息的 PDF 报告。