机器人校准设置
机器人校准需要两个对象:工具对象(由机器人持握)和基座参考对象(固定在工位内)。每次测量时跟踪仪必须能同时看到工具对象和基座参考对象。这些对象在VXelements软件中被称为"模型",它们通过安装在工具和参考框架对象上的一组靶标来定义。跟踪仪通过追踪这些靶标的位置,提供这些对象相对于跟踪仪的参考坐标系测量值。RoboDK将每次测量记录为工具相对于基座参考坐标系的位置,因此即使移动跟踪仪也不会影响测量结果。
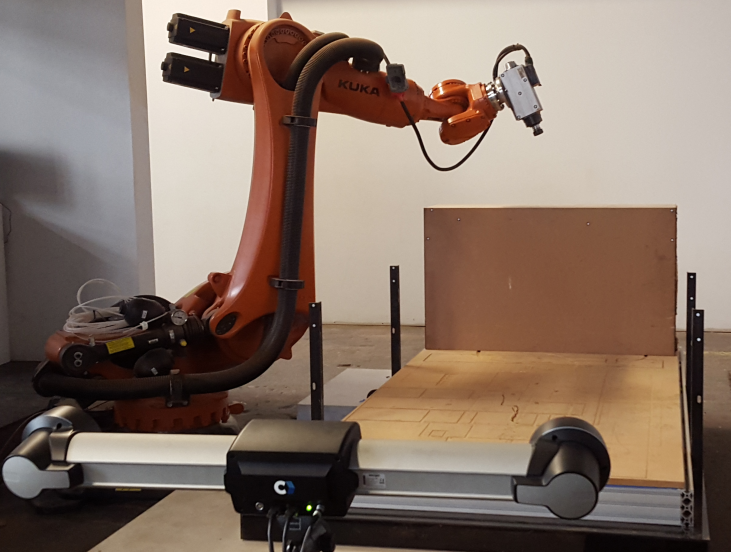
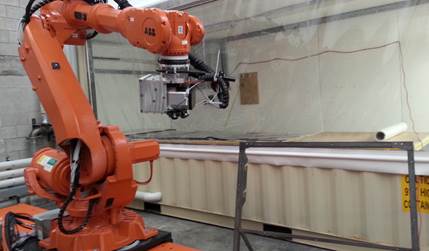
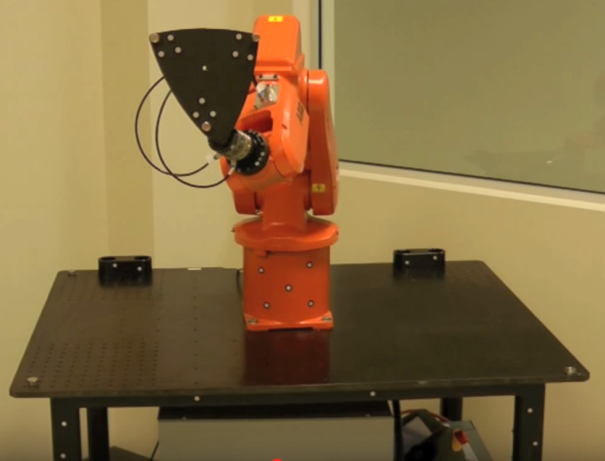
必须在工具和参考框架上分别安装一组靶标才能正确跟踪这些对象。下图展示了一些典型配置示例:

必须按顺序完成以下小节才能开始测量。最后,还需要将追踪仪和机器人连接到电脑上,以便自动执行测量程序。
探测参考坐标系
首先需要建立两个模型:工具模型和参考坐标系模型。每个模型都是由一组靶标点(X,Y,Z坐标)构成的集合,这些坐标值是相对于模型自身坐标系(工具坐标系或基座坐标系)定义的。
定义工具模型和基座模型需重复以下步骤:
1.通过选择"连接➔连接Creaform C-Track光学坐标测量机"与VXElements建立连接。
2.点击"连接"并等待状态显示为"Ready"。确保根据VXElements要求完成跟踪仪和HandyProbe测头的校准,同时确认已启用Creaform提供的VXTrack和VXModel软件模块。
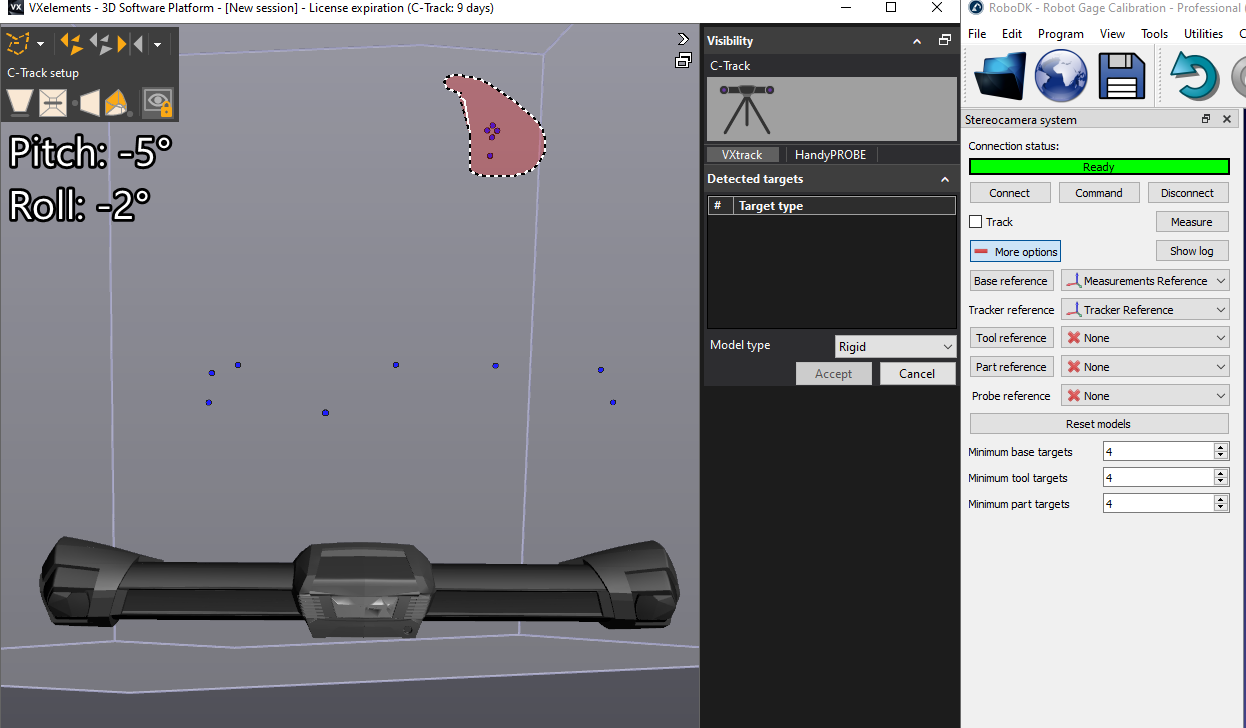
3.在RoboDK中选择"基座参考系"。VXelements将自动打开并显示可见的定位靶标。此时应选择所有静态参考点,务必排除可能移动的点。

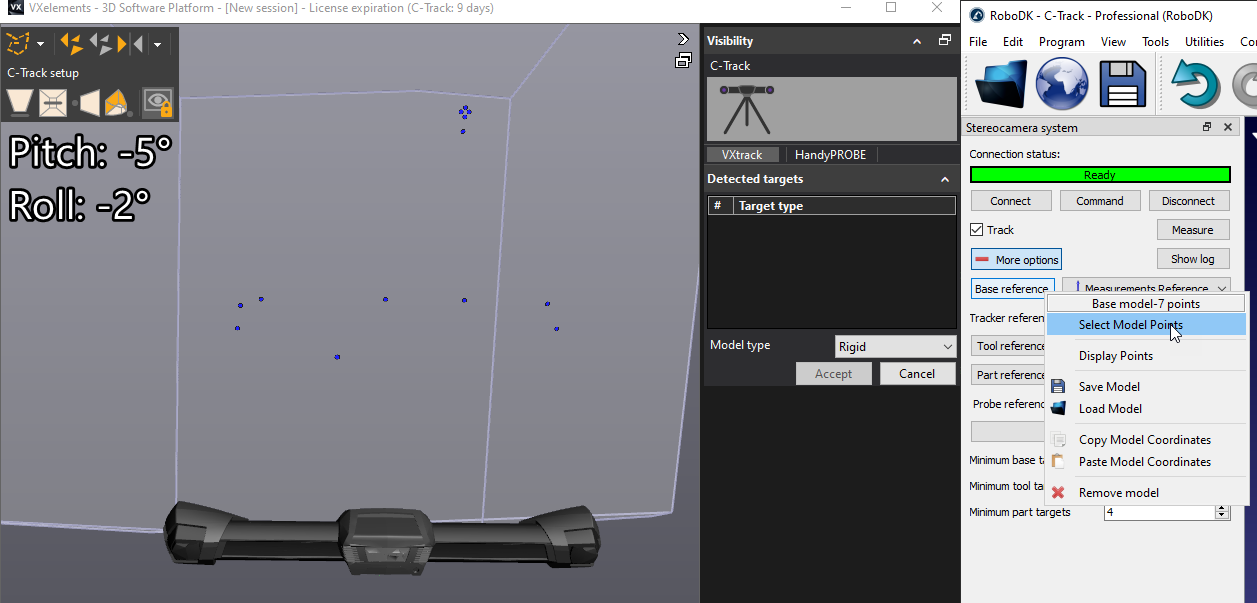
Tip:按住 CTRL 键可选择一组目标。
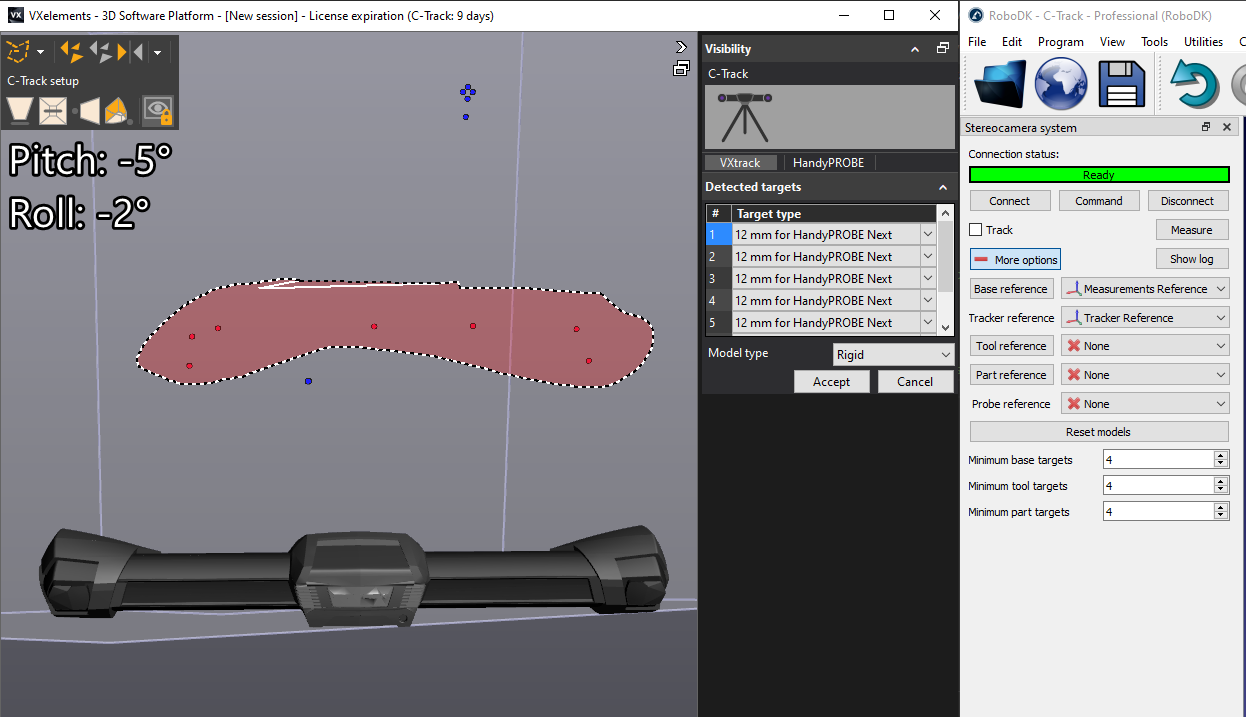
4.在RoboDK中选择"工具参考系",重复上述操作选择构成工具模型的靶标点。
Note:你可以选择将模型导入或导出为文本文件。你应该在文本文件中看到目标为 XYZ 坐标列表。你也可以在 RoboDK 中直观地看到这些点,方法是右键单击 "基本参考 "或 "工具参考 "按钮,然后选择 "显示点"。
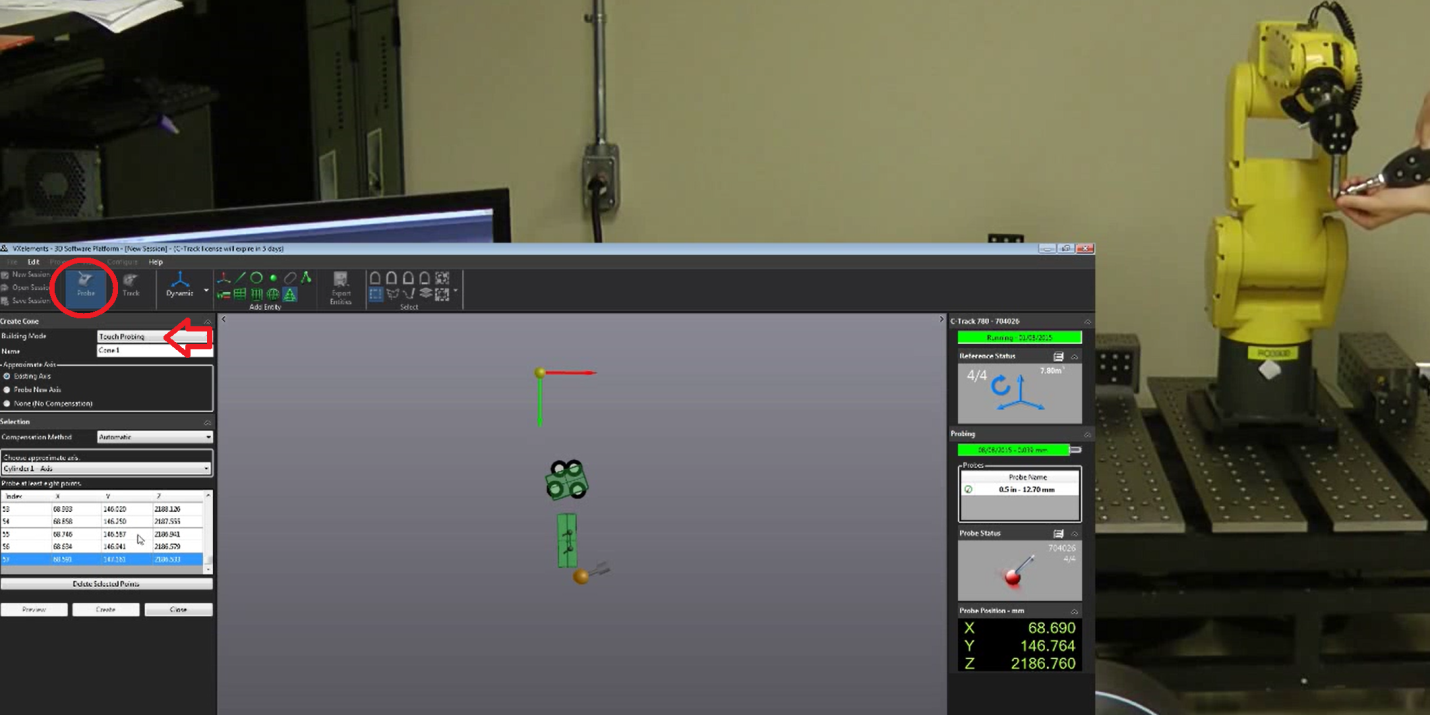
Tip:参考坐标系或工具中心点(TCP)可基于物体特征进行精确定位。如需确保工具特征相对于机器人法兰的精确位置(例如使工具Z轴与主轴基准圆柱轴线对齐),建议执行此可选步骤:使用HandyProbe测头在VXelements虚拟会话中采集特征数据。当前模型需设为定位模型,才能基于特征(点、线、面、圆柱、圆锥等)建立参考坐标系。
Note:对于复杂被测物体,可采用MaxShot设备或摄影测量服务建立模型,此方法可获得更高精度。
连接到追踪仪
要在 RoboDK 中正确设置通信,需要追踪仪的 IP。确保 VXelements 未运行,并按照以下步骤验证与追踪仪的通信:
a.菜单栏选择"连接➔连接立体相机"。打开一个新窗口。
b.输入基座模型和工具模型的文本文件(由前文所述步骤生成),这些文件分别定义了参考坐标系和工具坐标系的靶标位置数据
c.点击"连接 "按钮。
d.连接成功后,需再次提供基座和工具模型的文本文件(.txt格式)
Important: 模型的文本文件不会随 RoboDK 测量站一起保存。如果从外部修改了 TXT 文件,下次测量时将自动更新模型。
Note:高级用户可选择使用 HandyProbe 将参考坐标系放置在所需位置。
几秒钟后,如果连接成功,就会看到一条显示"Ready"的绿色信息。可以关闭VXelements 窗口,连接将保持激活状态。如果连接不成功,你必须确保Windows 任务栏或任务管理器中没有 VXelements 进程在幕后运行(选择 CTRL+ALT+DEL 强制停止 "VXelementsApiImplementation "进程),然后在 RoboDK 中选择"连接 "再试一次。

连接机器人
要正确设置与RoboDK的通信,需要机器人的IP(或RS232连接的COM端口号)。按照以下步骤验证与机器人的通信:
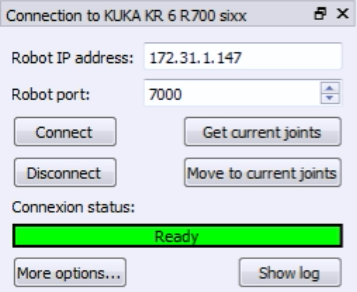
1.在菜单栏选择:连接➔连接机器人。软件左边界面出现一个连接机器人窗口。
2.输入机器人的IP和端口(如果通过RS232连接,则设置COM端口)。
3.单击按钮:连接。
4.若出现连接问题,请参阅附录。
Note:更多信息请参见程序章节。
如果连接成功,你将看到一条绿色信息,显示"Ready"。若选择获取位置,虚拟机器人的位置应与真实机器人的位置保持一致。或选择关节运动,那么机器人会移动到模拟器中的当前位置。你可以暂时关闭此侧窗口,连接将保持激活状态。
Important: 若在窗口处选择获取位置和关节运动,虚拟机器人的位置应与真实机器人的位置完全一致。否则,某些机器人设置可能不正确。可能需要调整某些机器人参数(如安川(Motoman)机器人的脉冲/度数比)。