机器人校准
机器人校准分为四个步骤,每个步骤都需要进行一组测量。必须按以下顺序执行:
1.底座测量(3分钟)。
2.工具测量(3分钟)。
3.校准测量(7分钟,60次测量)。
4.验证测量(7分钟,60次测量)。
以下视频演示如何在20分钟内完成校准:https://www.robodk.com/robot-calibration#tab-lt。验证测量(第4步)并非强制要求,但能客观反映校准后的精度效果。您还可以观察机器人在某一区域校准后,在另一区域验证时的精度差异。
为每组测量点击测量按钮,将弹出新窗口支持:采集新测量数据、导入/导出文本格式(CSV或TXT)的现有测量数据。
默认情况下,机器人会通过实时连接与测量系统自动同步。若无可用的机器人驱动程序,仍可通过以下方式完成校准:
1.取消选中选项:自动同步。
2.点击按钮:创建机器人程序。
3.使用合适的后处理器生成程序(需通过示教器手动同步)
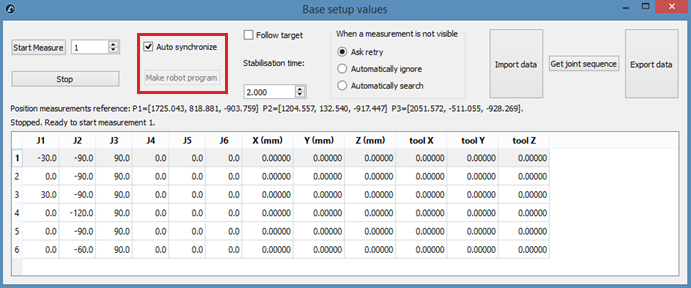
测量底座
测量时可在工具法兰盘任意位置进行,但需确保6次测量均针对同一目标点。启动测量流程:在基座设置区域点击测量,弹出窗口后选择开始测量,机器人将按预设序列自动同步。
Tip:双击某次测量点可从此位置继续测量。

完成所有测量后关闭窗口,测量坐标系将相对于机器人基坐标系自动更新。如果没有选择任何参考坐标系,可以添加一个参考坐标系(菜单栏选择程序➔添加参考坐标系),并将其置于机器人基准参考坐标系之下(在项目树中拖放)。

摘要将显示机器人参考坐标系相对于校准参考坐标系的位置和方向([x,y,z,w,p,r]格式,单位为毫米和弧度)。
完成这一步后,你就可以在 RoboDK 中实时准确地显示追踪仪相对于机器人的工作空间。
测量工具
和上一节一样:在工具设置部分选择测量。将打开以下窗口。选择 "开始测量",机器人将按顺序完成计划的测量。双击某个测量点,可从该位置继续测量。
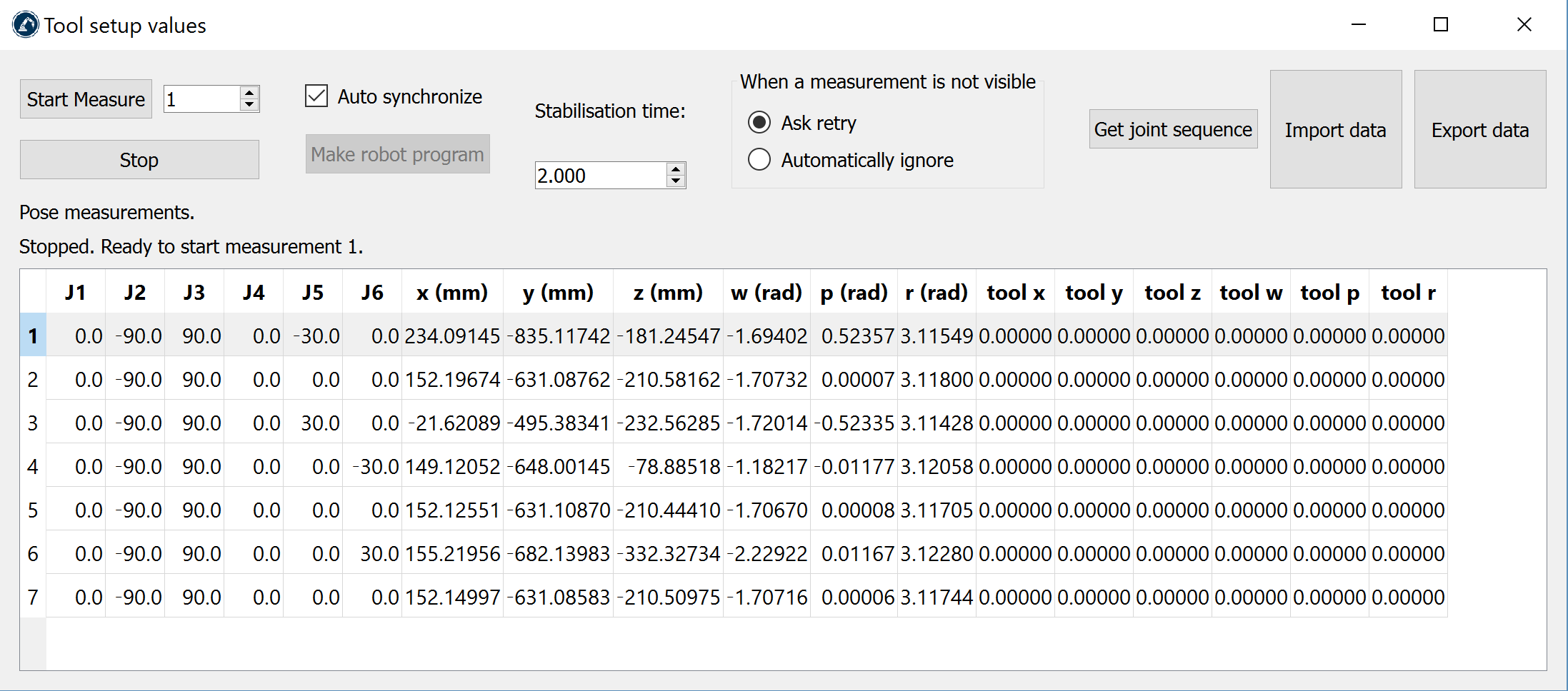
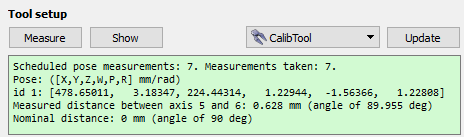
程序完成后,摘要将显示校准后的 TCP(位置和方向)。TCP 的定义(下图中为 "主轴")将自动更新。如果没有选择任何TCP,可以添加一个新的 TCP(选择 "程序➔添加工具"),然后选择"更新"。
校准测量
在窗口的校准模块点击测量,打开机器人校准测量窗口。然后,选择"开始测量",机器人将按顺序完成计划的测量。双击某个测量点,即可从该位置继续测量。
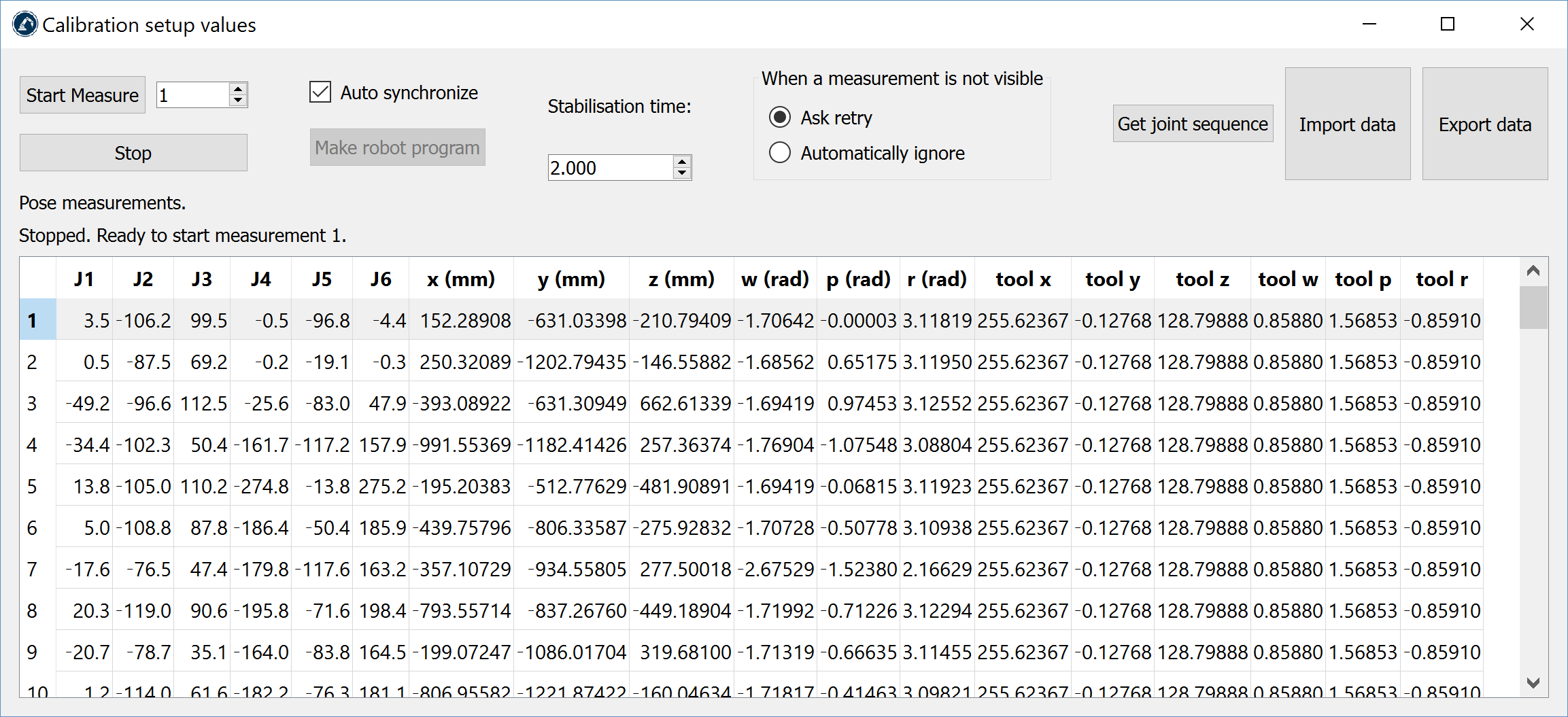
测量完成后关闭窗口。机器人将自动校准,如果没有问题,它会显示以下信息。
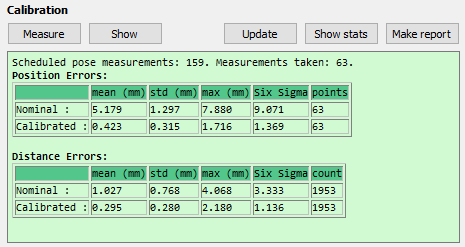
最后,绿色屏幕会显示一些有关校准测量的统计数据,以及这些测量的精度提高了多少。
验证测量
禁止使用校准时的测量数据验证机器人精度,必须采集独立验证数据集以获得客观精度评估。
必须按照相同的校准程序进行验证测量。摘要将显示验证统计数据。更多信息,请参阅校准结果章节。