Robot Calibration (Optical CMM)
RoboDK提供了一些实用程序来校准参考框架和工具框架。可以从实用程序中访问这些工具➔校准参考框架和公用事业➔校准工具架分别。
要校准参考框架或工具框架(分别也称为用户框架和TCP),我们需要一些接触3个或更多点的机器人配置,这些机器人配置可以是关节值或直角坐标(在某些情况下带有方向数据)。建议使用关节值而不是笛卡尔坐标,因为这样更容易检查RoboDK中的实际机器人配置(通过将机器人关节复制粘贴到RoboDK主屏幕中)。
重要:校准机器人后,强烈建议使用关节值代替直角坐标。如果我们使用关节值,则会考虑机器人的精度以更精确地教导TCP。
选择实用程序➔校准工具使用RoboDK校准TCP。我们可以使用不同的方向根据需要使用任意数量的点。更多的点和较大的方向变化会更好,因为我们将获得更好的TCP估计以及TCP错误的估计。
注意:有关更多信息,请参见提示部分。
以下两个选项可用于校准TCP:
● 通过用不同方向的TCP触摸一个固定点。
● 通过使用TCP接触平面(例如测头)。
如果需要校准测头或主轴,建议通过触摸平面参考进行校准。此方法对于用户错误更稳定。
如果TCP是球形的,则将球的中心计算为新的TCP(不必提供球的直径)。

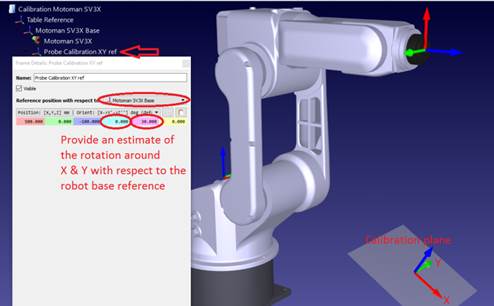
必须按照以下步骤用平面校准TCP(如图所示):
1.选择需要校准的工具。
2.选择校准方法➔“乘飞机校准XYZ”。
3.使用“接头”选择校准。
4.选择正在使用的机器人。
5.选择我们将用于TCP校准的配置数量(建议采用8种或更多配置)。
6.选择参考平面的估计值。如果参考平面不平行于机器人XY平面(来自机器人参考),我们必须在±20度内添加该参考平面的估计值。该平面的位置并不重要,而只是方向。
7.我们可以开始填写联合值表。我们可以手动填充它,也可以使用按钮进行复制/粘贴(如图所示)。我们还可以使用“获取Jx”按钮从模拟器中的机器人获取当前关节值。如果要从连接到机器人的真实机器人获取关节,则必须首先从机器人连接菜单中选择“获取当前关节”(有关将机器人与RoboDK连接的更多信息,请参见附件图像或附录)。强烈建议保留用于校准的关节的单独副本(例如,文本文件)。

8.填满表格后,我们将在窗口末尾看到新的TCP值(X,Y,Z)为“ Calibrated TCP”。我们可以选择“更新”,新的TCP将在RoboDK站中更新。使用此方法无法找到探头的方向。
9.我们可以选择“显示错误”,然后将看到每个配置相对于所计算的TCP的错误(这是所有配置的平均值)。如果一个配置的错误比其他配置大,我们可以删除它。
10. 我们必须在真实的机器人控制器中手动更新值(仅X,Y,Z)。如果此TCP将用于RoboDK生成的程序中,则无需更新机器人控制器中的值。
选择实用程序➔校准参考校准参考框架。可以使用不同的方法设置参考系。在该图的示例中,参考框架由三个点定义:点1和2定义X轴方向,点3定义正Y轴。

重要:建议在校准参考系之前使用关节目标并激活机器人精度,因为机器人手臂的精度将有助于更好地定义参考系。
注意:有关参考帧校准的更多信息,请参见提示部分。