底座测量
测量时可在工具法兰盘任意位置进行,但需确保6次测量均针对同一目标点。启动测量流程:在基座设置区域点击测量,弹出窗口后选择开始测量,机器人将按预设序列自动同步。
Tip:双击某次测量点可从此位置继续测量。
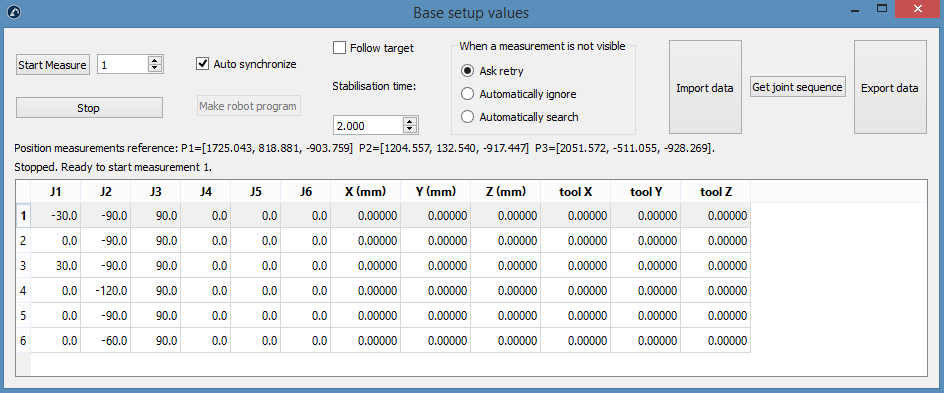
完成所有测量后关闭窗口,测量坐标系将相对于机器人基坐标系自动更新。如果没有选择任何参考坐标系,可以添加一个参考坐标系(菜单栏选择程序➔添加参考坐标系),并将其置于机器人基准参考坐标系之下(在项目树中拖放)。
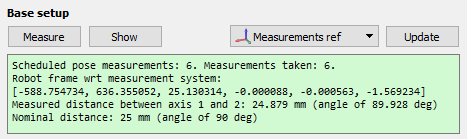
摘要将显示机器人参考坐标系相对于校准参考坐标系的位置和方向([x,y,z,w,p,r]格式,单位为毫米和弧度)。