机器人校准设置
需要将激光跟踪仪和机器人连接到计算机,以便自动执行测量程序。此外,建议通过三个点测量参考坐标系,以防移动激光追踪仪(如果要恢复轴1的原点,则必须执行此步骤,详情请参见附件II)。
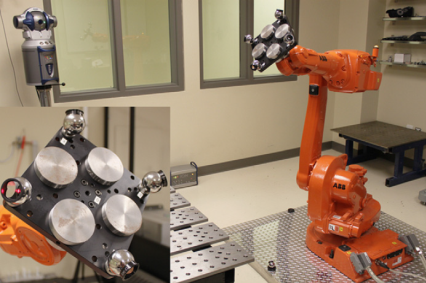
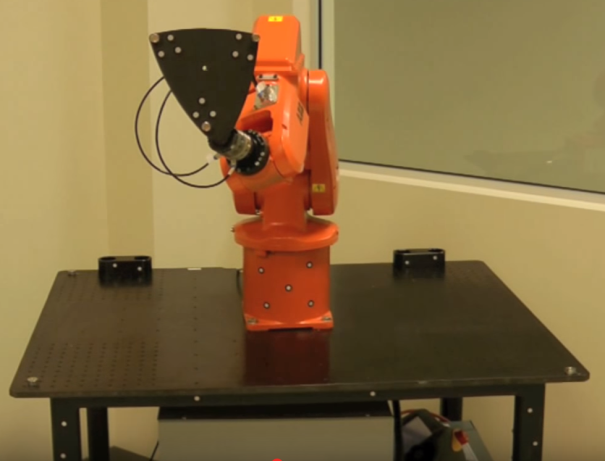
要求至少连接一个SMR目标(建议连接三个或更多),如下图所示。
必须按顺序完成以下小节,开始测量。
连接至追踪仪
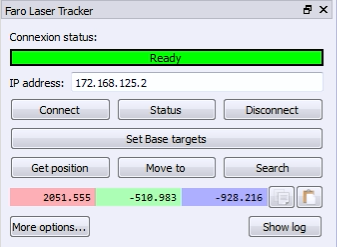
要正确设置与RoboDK的通信,需要激光跟踪仪的IP。请按照以下步骤验证与激光跟踪仪的通信:
a.选择菜单栏选择:连接➔连接Faro激光跟踪器。就会打开一个新窗口。
b.设置激光跟踪仪的IP。
c.然后点击按钮:连接。
如果连接成功,你将看到一条显示Ready的绿色信息。可以关闭窗口,连接将保持激活状态。
连接机器人
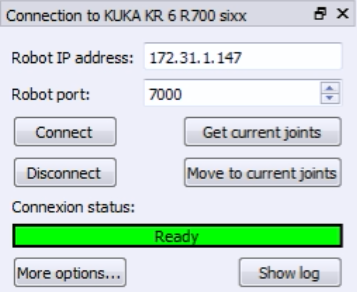
要正确设置与RoboDK的通信,需要机器人的IP(或RS232连接的COM端口号)。按照以下步骤验证与机器人的通信:
1.在菜单栏选择:连接➔连接机器人。软件左边界面出现一个连接机器人窗口。
2.输入机器人的IP和端口(如果通过RS232连接,则设置COM端口)。
3.单击按钮:连接。
4.若出现连接问题,请参阅附录。
Note:更多信息请参见程序章节。
如果连接成功,你将看到一条绿色信息,显示"Ready"。若选择获取位置,虚拟机器人的位置应与真实机器人的位置保持一致。或选择关节运动,那么机器人会移动到模拟器中的当前位置。你可以暂时关闭此侧窗口,连接将保持激活状态。
Important:若在窗口处选择获取位置和关节运动,虚拟机器人的位置应与真实机器人的位置完全一致。否则,某些机器人设置可能不正确。
测量参考目标
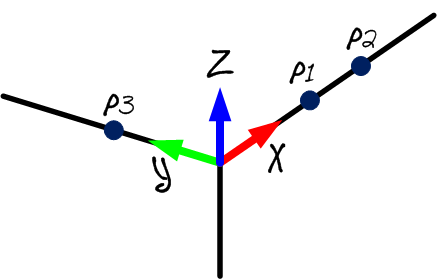
如果计划在校准过程中移动激光跟踪仪,建议测量一个校准参考坐标系。校准参考框架应固定在机器人底座上,这将有助于在校准过程中移动追踪仪或比较两个机器人的校准结果。校准参考坐标系需要由3个可触摸的物理点/定位巢来定义这个参考坐标系。
Important:强烈建议首次校准时不移动激光跟踪仪。
如果不打算相对于机器人移动追踪仪,或者不需要恢复轴1的原点,则可以跳过这一步。在这种情况下,将使用激光追踪仪的基准。
Important:如果要恢复轴1的原点,更多信息请参阅附录III。
每次移动激光跟踪仪时都应遵循这些步骤:
1.在菜单栏选择:连接➔连接Faro激光追踪仪。或其他追踪仪也可以。
2.输入激光跟踪仪的IP,然后选择连接(如果激光跟踪仪未连接)。
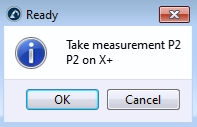
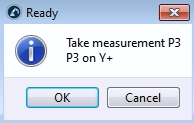
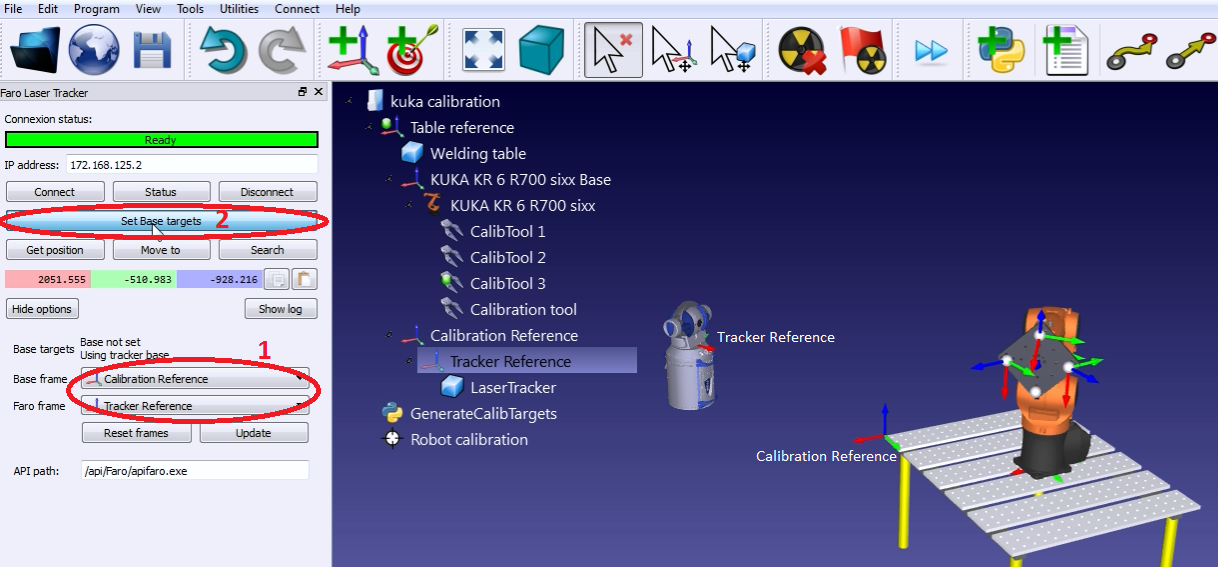
3.如图所示,设置校准基准和追踪仪基准。校准基准也称为"测量基准"。
4.选择"设置测量参考系"。
在RoboDK中进行激光跟踪仪校准时,软件会通过直观的界面引导用户完成整个流程。程序完成后,激光跟踪仪的位置将相对于校准基准自动更新。