附件
机器人校准需通过测量系统采集数据。本操作要求Faro激光跟踪仪与计算机建立通信,通过控制台模式运行的驱动程序(exe文件)实现。
例如Faro提供的免费应用程序"TrackerUtilities"可初始化激光跟踪仪并执行系统诊断。操作流程如下:
1.启动程序后连接跟踪仪IP地址
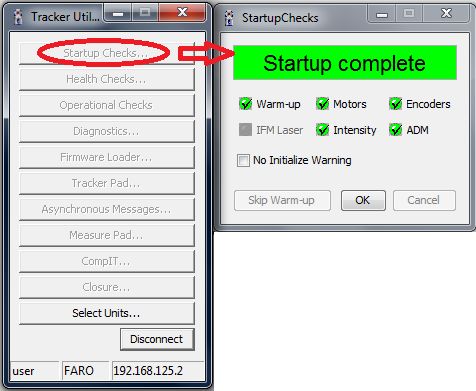
2.选择"StartupChecks"功能
3.初始化前需将1.5英寸SMR靶球置于"原点"位置(否则初始化后绿灯闪烁且测量无效)
4.完成初始化将显示"启动完成"提示(见下图)
初始化完成后,你将看到"Startupcomplete"信息,如下图所示。

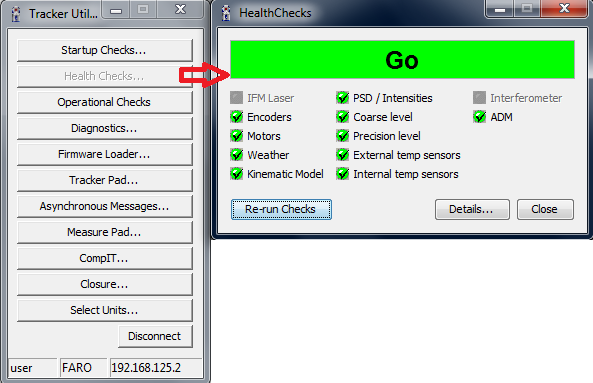
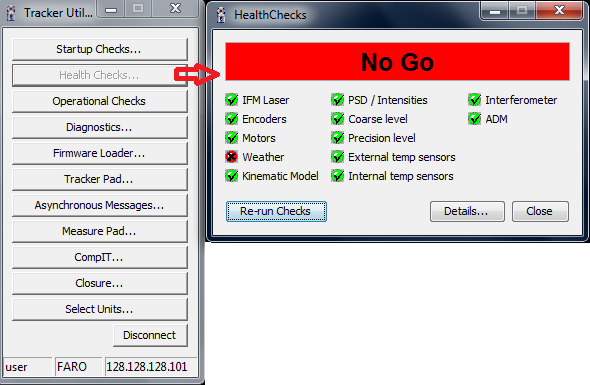
若出现故障,可点击"HealthChecks..."运行检测程序(下两图分别展示成功与失败状态)。通常重新连接线缆并重启设备可解决问题。
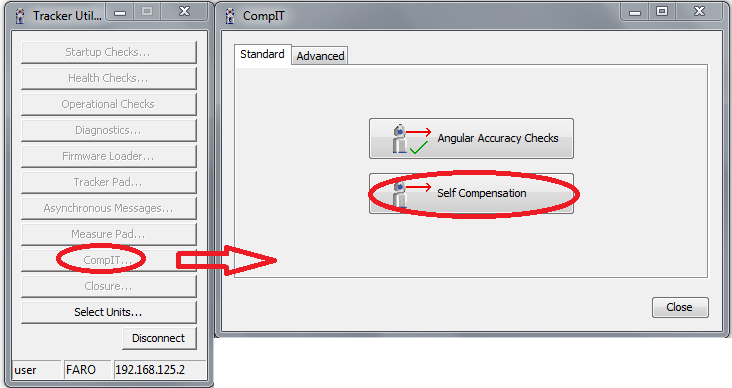
Note:建议定期执行跟踪仪自补偿校准(Self compensation)。该功能通过跟踪仪头部内置的基准点自动修正测量系统误差。
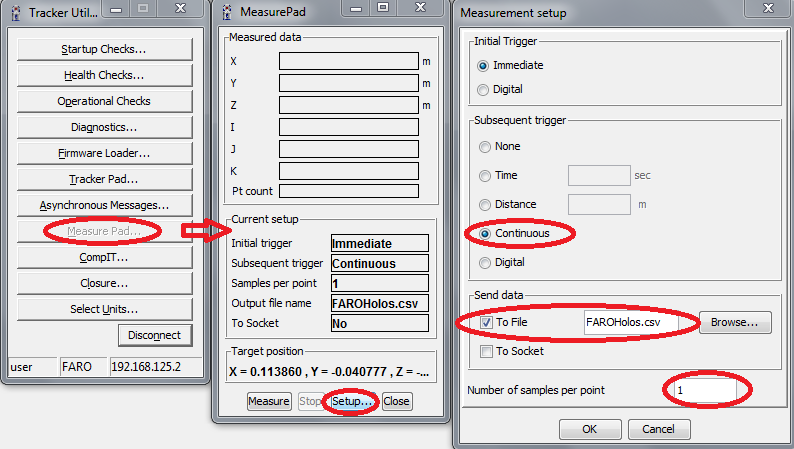
通过"Measurepad"功能可进行数据采集。激光跟踪仪能以1000Hz频率追踪靶球并记录XYZ坐标。若设置单点采样+连续触发模式,每秒将生成包含1000组数据的CSV文件。
此功能可用于检测机器人路径精度,结合RoboDK路径分析工具可评估轨迹各点的定位精度、速度及加速度参数。