Robot Calibration (Laser Tracker)
机器人校准分为4个步骤。每个步骤都需要进行一组测量。必须遵循以下四个步骤:
1.基本参考测量值(3分钟)。
2.刀具参考测量(3分钟)
3.校准测量(7分钟,60次测量)
4.验证测量(7分钟,60次测量)。
以下视频显示了如何在20分钟内执行此校准:https://www.robodk.com/robot-calibration#tab-lt。验证测量值(第4步)对于校准机器人不是强制性的,但是它们提供了准确性结果的客观观点。也可能会看到在一个区域内校准机器人并在另一个区域内进行验证的影响。
为四组测量中的每组选择按钮测量。这将打开一个新窗口,该窗口允许进行新测量以及以文本文件(csv或txt格式)导入和导出现有测量。
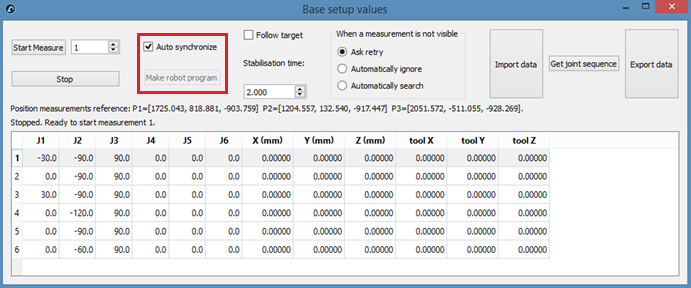
如果我们对所有6次测量都测量相同的目标,则可以在工具法兰上的任何位置执行这些测量。要开始测量,请在“基本设置”部分中选择“测量”。将打开以下窗口。然后,选择“开始测量”,然后机器人将按顺序进行计划的测量。
提示: 双击测量以从该位置继续测量。
测量完成后关闭窗口,并且测量参考框架将相对于机器人基础框架进行更新。如果未选择任何参考框架,则可以添加参考(选择“程序”➔添加参考框架)并将其放在机器人基础参考下(在项目树中拖放)。

摘要将显示相对于校准参考系的位置和方向或机器人参考系([x,y,z,w,p,r]格式,单位为mm和弧度)
1-6测量可以在工具法兰上的任何位置执行,只要我们为6次测量测量相同的目标即可。此后,我们要测量的每个TCP都会为同一个TCP添加一个测量,在这种情况下,我们有3个TCP,因此总计6 + 3 = 9个测量。我们可以双击一个测量以从该位置继续测量。
像上一节一样:在“工具设置”部分中选择“测量”。将打开以下窗口。选择开始测量,机器人将按顺序进行计划的测量。双击测量以从该位置继续测量。

该步骤完成后,摘要将显示已校准的TCP。TCP的定义(在下图“ CalibTool 1”中)将自动更新。如果我们没有选择任何TCP,则可以添加一个新的TCP(选择“程序➔添加空工具”),然后选择“重新计算”。将出现一个新窗口,我们必须根据进行测量的顺序选择工具的“ id”。我们可以重复相同的过程来更新所需的TCP(在本例中为3个TCP)。如果工具名称以数字结尾,则将自动检测该工具的ID。

在“校准”部分中选择“测量”。将打开以下窗口。然后,选择“开始测量”,机器人将按顺序进行计划的测量。双击测量以从该位置继续测量。

测量完成后,关闭窗口。机器人将自动校准,如果没有问题,它将显示以下消息。

最后,绿色屏幕将显示一些有关校准测量的统计数据,以及这些测量的精度提高了多少。

我们不应该使用与校准机器人相同的测量值来验证机器人的精度,因此,建议采取其他测量方法来验证精度(对精度结果有更客观的认识)。
必须遵循相同的校准程序才能进行验证测量。摘要将显示验证统计信息。见以下结果部分欲获得更多信息。