Robot Calibration (Laser Tracker)
一旦对机器人进行了校准,我们通常需要RoboDK来过滤程序,因此,需要RoboDK许可证(基本的OLP许可证足以在机器人被校准后生成准确的机器人程序)。过滤程序意味着要考虑所有校准参数(约30个参数),更改/优化程序中的目标以提高机器人的精度。
或者,我们可以仅校准关节偏移量以及基础和工具参考框架(4个关节偏移参数,基础框架为6个参数,工具框架为6个参数)。校准的准确性不如我们使用默认的完整校准,但它可能允许在机器人控制器中输入某些参数,而不依赖RoboDK生成机器人程序。
要仅对关节偏移进行校准,我们必须选择Calib。参数按钮,然后是Mastering按钮(在机械手校准菜单内)。
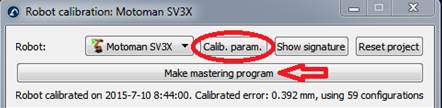
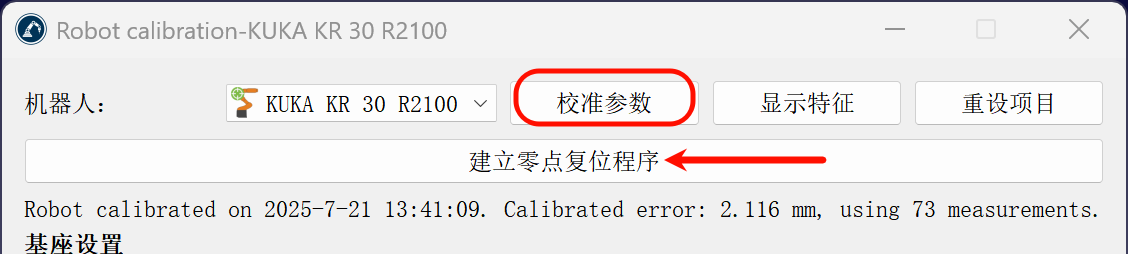
选择“制作母带程序”后,将出现一个新窗口。在此窗口中,我们可以选择要考虑创建新的原始位置的轴。

“制作母带程序”按钮将出现在机器人校准窗口中。选择此按钮以生成一个程序,该程序会将机器人带到新的原始位置。将其传送到机器人并执行,然后必须记录新的原始位置。
重要:需要特别注意恢复轴1和轴6的原始位置,有关更多信息,请参见附录。
如果连接了机器人和PC,我们可以右键单击该程序并选择发送程序给机器人自动将程序发送给机器人。否则,我们可以选择生成机器人程序查看原始位置的新关节值。

重要:如果我们更改了机器人的控制参数(原始位置),但仍要使用完整的校准(过滤器程序),则必须再次进行校准测量(并进行验证,如果有的话)并重新校准。在这种情况下,我们可以使用RoboDK过滤程序或从头开始生成程序(通过CAM文件:APT,G代码等)。
例如,我们必须按照以下步骤更新Motoman机器人的原位。
重要:我们不应两次运行此过程。否则,我们将设置其他原始位置。
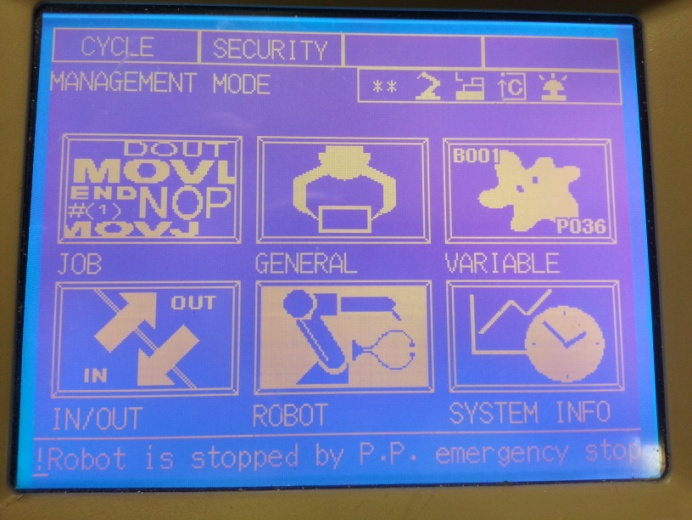
我们必须首先运行程序“ MASTERING”,以将机器人移至新的原始位置。
程序进入控制器后,我们必须以“管理模式”登录(Motoman机器人的密码通常为99999999),并且我们必须处于示教模式。下图显示了必须遵循的步骤。


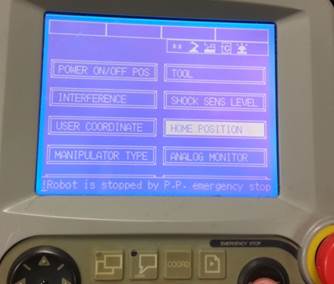

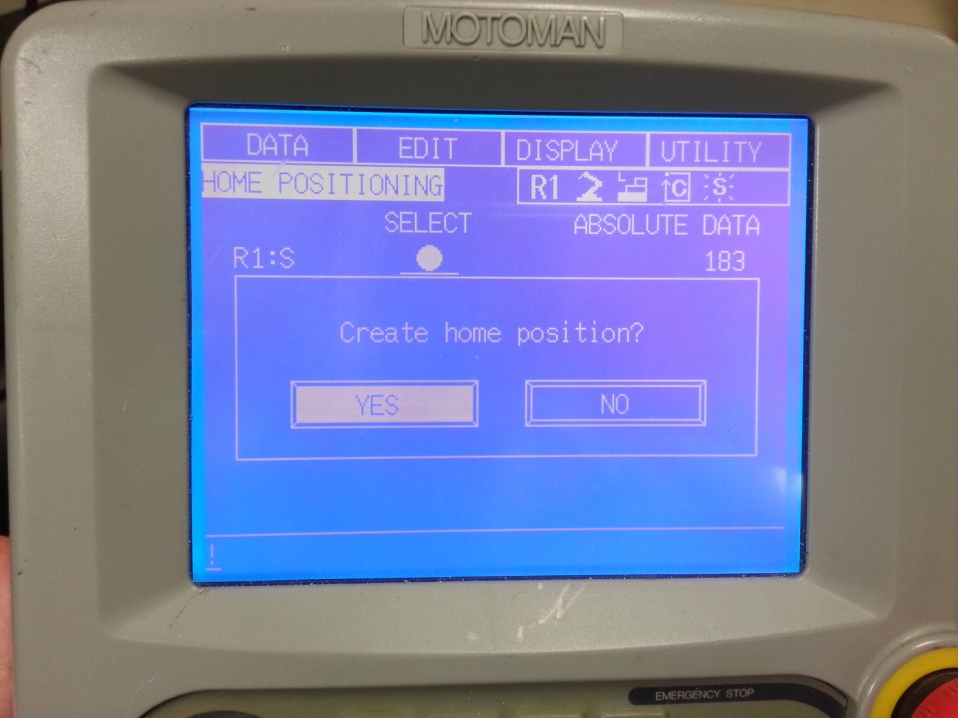
确保更新所有机器人关节的原始位置。
设置原始位置后,我们必须删除将机器人带到新的原始位置的机器人程序。
重要:我们不应两次执行此过程。