Robot Calibration (Laser Tracker)
如果要恢复轴1和6的主控/原点值,则必须特别注意。这些值与轴1的机器人基础框架和轴6的TCP参考直接相关。因此,必须进行外部测量正确设置这些值。在校准菜单中选择“制作母带程序”后,将显示此窗口。

必须遵循以下两个步骤才能正确设置这两个轴的控制参数。
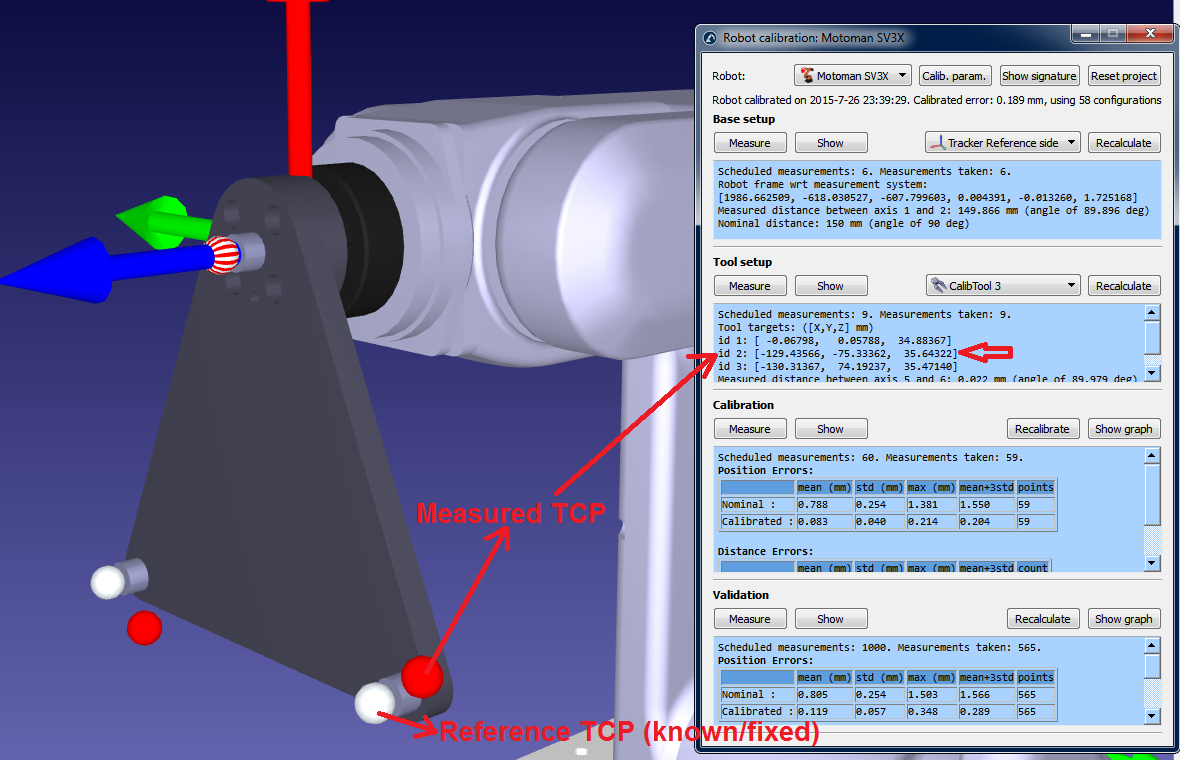
我们必须使用参考目标来正确设置轴6的“原始”位置。角度偏移将是工具法兰围绕Z轴的旋转,以最佳方式将已知的测量TCP(X,Y,Z)拟合到已知值。 TCP参考。所测量的TCP(请参见下图)是在校准过程的第二步中测量的TCP之一。参考TCP是与使用的校准工具的TCP之一相对应的已知参考。
理想情况下,参考TCP必须由CMM相对于工具法兰进行测量(最好使用机器人工具法兰的副本)。或者,我们可以使用新的机器人第一次测量(校准过程的第二步)TCP,并使用一个测得的TCP作为参考。使用销钉和/或适当的工具法兰参考点很重要,以确保将末端执行器始终放置在同一位置。

如果要将轴1与真实的机器人基础框架对齐,则必须在开始进行机器人校准之前正确测量三个基础目标。必须选择这些基本目标,以便可以相对于机器人找到参考系。
轴1的“起始”位置直接取决于三个基本目标以及机器人基本设置。机器人基础设置是第一步校准,其中通过移动和测量轴1和2相对于机器人基础框架放置测量系统的基础框架。
可以通过按“设置基本目标”来设置测量系统的基本目标(参见下图)。这是3个测量值,它们将定义所需的机器人参考系(前2个测量值定义X轴,第三个点定义为正Y轴)。我们应该使用与机器人基座相关的适当参考点,以便此过程可重复。
关节1的校正角将是通过3个点测得的基本参考的X轴与通过移动机器人轴1和2测得的基本参考之间的夹角。通过触摸树点获得的基本参考。