自定义机器人驱动
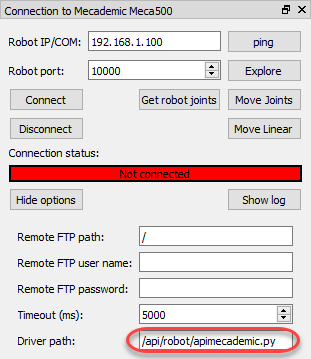
在默认状态下,机器人驱动器位于/RoboDK/api/Robot/文件夹中。RoboDK中的连接设置将机器人与其驱动器相关联:
1.右键点击机器人
2.选择
3.选择更多选项...
4.在 "驱动 "部分定位或者输入机器人驱动器地址
每个机器人驱动器是一个独立的应用程序。机器人驱动器可以通过任何编程平台开发,例如,驱动器可以是Python模块(py格式)或者使用任何IDE环境编译的可执行程序。
机器人驱动器可以通过命令行模式与机器人通信。RoboDK使用同样的命令在PC电脑上驱动机器人。每个机器人驱动器都可以单独在控制台模式下运行并测试。
在C:/RoboDK/bin/robot/ 文件夹中有一个Python驱动器范例(apimecademic.py)以及它的源代码,用于控制Mecademic机器人。
双击apimecademic.py文件在控制台模式下运行该模块(需要安装Python)。机器人驱动器启动后会等待用户输入指令。例如,可以使用以下命令根据已知IP地址与端口号连接机器人:
CONNECT 192.168.100.1 10000
如果连接成功将出现SMS:Ready信息。此时可以使用以下命令获得机器人关节轴的当前位置:
CJNT
可以使用运动指令例如MOVJ, MOVL,或者SETTOOL更新机器人工具TCP:
MOVJ 10 20 30 40 50 60
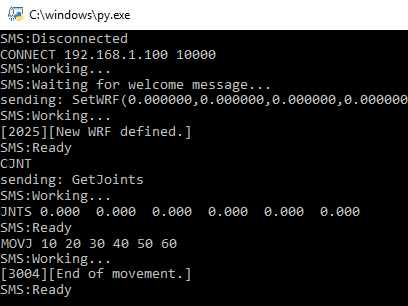
某些型号的机器人支持关节轴位置的实时监测。可以通过JNTS_MOVING指令在机器人移动时获得即时位置反馈。在RoboDK内运行机器人驱动器时,虚拟环境中的机器人也将跟随真机实时移动。在Ready信息再次显示之前,驱动器不能处理新的指令。
用户与控制台的互动、机器人的连接是通过一个Mecademic 驱动器的Python模块管理的。对于所有机器人都有同样的控制台互动,如本部分介绍。但是,与机器人的连接取决于不同的机器人生产商,在此例中请参考Meca 500 programming manual使用手册中的指令。这些指令用于移动或者监测Meca 500机器人。