故障检测
机器人驱动器的设置相对于离线生成程序更加复杂。如果连接不成功,以下提供一些解决连接问题的帮助:
1.检测机器人的IP地址是否正确:在机器人连接菜单中选择ping按钮(或通过命令行 ping 机器人),确保机器人与计算机处于同一网络中
2.如果机器人和计算机不在同一个网络中,请为计算机设置静态IP地址。
3.确保计算机上的防火墙没有阻止任何连接。
4.确保通讯端口恰当,并且在机器人端可供使用。
5.确保在机器人控制器上使用了与其型号相匹配的控制指令。
6.在机器人连接窗口双击Disconnect按钮强制停止机器人驱动器,之后再次点击connect重新尝试连接。
Note:在Windows系统上执行某些操作可能需要管理员权限。
Ping测试
Ping测试用于检测机器人设备在IP网络中的可达性状态。
Windows系统执行步骤:
1.选择
2.输入cmd并点击确定
3.输入:ping IP(机器人IP地址),例如:
ping 192.168.125.2
正常响应应显示类似下图的反馈(如:Lost = 0% loss)。
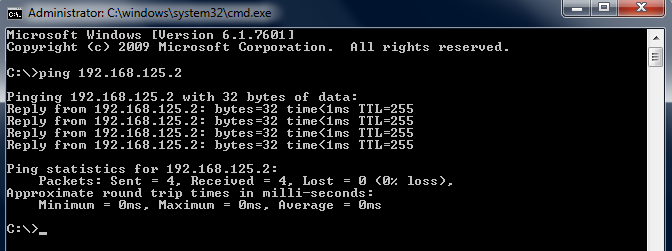
若未收到响应:确认机器人IP与PC处于同一局域网(LAN),临时关闭Windows防火墙,或添加防火墙放行规则。
设置静态IP地址
请按照以下步骤更改计算机的 IP:
1.选择:开始➔ 控制面板➔ 网络和Internet➔ 连接到网络。
2.双击本地连接(有线网卡)。
3.右键点击:属性。
4.选中:Internet协议版本4 (TCP/IPv4)
5.再次点击:属性。
6.根据机器人 IP输入计算机IP,填写对应的子网掩码。
