如何使用机器人驱动
本节介绍如何使用机器人驱动器,将RoboDK 连接到真正的机械臂,并执行一些简单的操作。
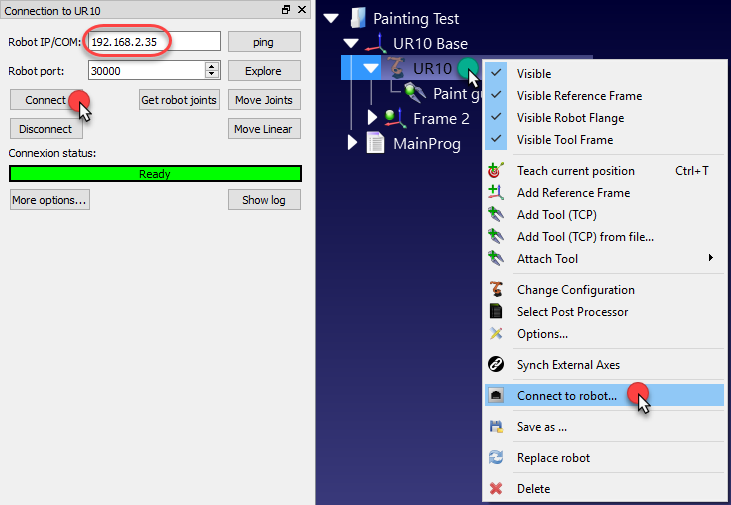
1.右键点击机器人
2.选择
3.输入机器人的 IP 地址
4.选择连接
如果连接测试成功,连接状态会显示Ready绿色图标,如下图所示。
Tip:在连接机器人窗口,选择"获取位置",可以从真机获得当前机器人位置,并更新RoboDK中的虚拟机器人位置。
Tip:在连接机器人窗口,点击“断开”按钮,可强制停止机器人驱动器。如果机器人真机意外停止(例如遭遇碰撞或者轴极限),机器人驱动器可能失去响应,此时可以通过双击“断开”按钮,并再次点击“连接”,重启驱动器。
使用GUI
使用用户图形界面(即GUI)生成的机器人程序可以通过以下步骤在机器人真机上运行:
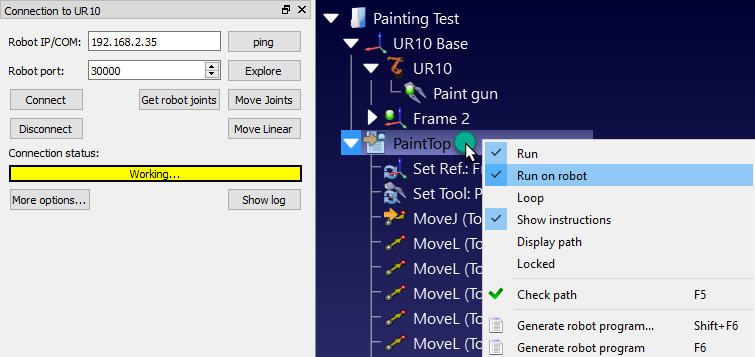
1.右键单击
2.选中 "在机器人上运行 "选项
3.双击程序即可运行
机器人将于机器人真机上运行,而仿真器的机器人运动与其同步。连接状态将显示Working信息,表示机器人处于工作状态。
使用 API
可以通过RoboDK API控制机器人运动,例如,使用Python程序或者C#应用对机器人编程。
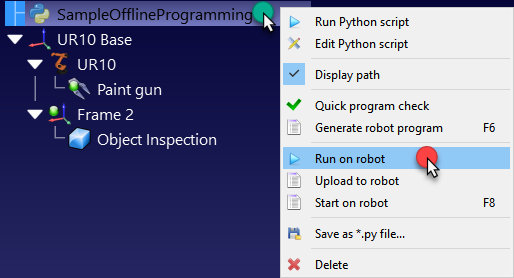
在机器人真机上运行Python程序(Run on robot选项)由RoboDK自动管理。按照以下步骤在机器人上运行Python程序:
1.右键单击
2.选择
程序应开始在机器人上运行,机器人连接状态也会相应更新。
如果选择在RoboDK的GUI之外运行该程序(例如为了调试程序,或者使用RoboDK C# API),可以使用RDK.setRunMode将运行模式设置为RUNMODE_RUN_ROBOT。该设置将强迫程序在机器人真机上运行。还可以使用robot.Connect()与机器人建立连接。
以下代码演示了在API中与机器人建立连接的简单范例:
# 启动 RoboDK API
RDK= Robolink()
机器人= RDK.Item('',ITEM_TYPE_ROBOT)
# 使用默认连接参数连接机器人
success= robot.Connect()
status, status_msg= robot.ConnectedState()
IF status != robotcom_ready:
# 如果连接不成功,则停止
raise Exception("Failed to connect: "+ status_msg)
# 设置在机器人上运行机器人命令
RDK.setRunMode(RUNMODE_RUN_ROBOT)
# Note:如果我们使用
# 通过 API 连接机器人
# 移动机器人:
robot.MoveJ([10,20,30,40,50,60])
prog= RDK.Item('MainProgram', ITEM_TYPE_PROGRAM)
prog.setRunType(PROGRAM_RUN_ON_ROBOT) # 设置机器人运行选项
# 设置为 PROGRAM_RUN_ON_SIMULATOR,以便仅在模拟器上运行
prog.RunProgram()
while prog.Busy()== 1:
pause(0.1)
print("Program done")