曲线跟踪项目
通过曲线跟踪项目(CFP)可以让机器人沿3D空间完成曲线运动。RoboDK中的曲线可从物体边缘选取,或以点坐标列表形式通过CSV文件导入。曲线跟踪项目适用于机器人焊接、去毛刺、抛光或喷涂等制造工艺。
Tip:曲线可带有法向量,该向量将与刀具Z轴对齐(通常垂直于曲面)。
曲线跟踪项目的操作流程如下:
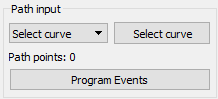
1.在主菜单栏点开实用程序➔ 曲线跟踪项目,打开曲线跟踪设置。这里的设置大部分与机器加工项目一致,唯一的区别是路径输入的下拉选项默认为选择曲线。
2.点击选择曲线按钮,在屏幕上选择曲线。
Note:通过 RoboDK 提供的各种工具创建或提取曲线。另外,大多数 CAD 软件的 RoboDK 插件会自动创建曲线,并在曲线跟踪项目中选择这些曲线。在这种情况下,你可以配置机器人刀具路径,如机器人加工章节所示。
Tip:曲线有一个法向量,它将与工具 Z 轴(默认情况下通常为表面法线)相匹配。
3.用鼠标左键选择曲线。两次选择同一条曲线将调换运动方向。此外,右键单击之前选中的曲线也可以交换运动方向或取消选中之前选中的曲线。
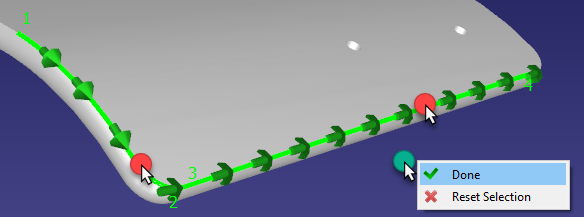
Note:绿色数字显示了运动的顺序。
Tip:如果曲线靠的太近影响了选择,可以到菜单栏中选择工具➔选项➔ 显示,找到“选择曲线灵敏度”,调低数值即可。你也可以按一次或多次减 (-) 键来缩小绿色箭头的大小。
在 3D 窗口上单击右键,选择 "完成",或按 Esc 键返回设置菜单。绿色路径将显示机器人相对于物体的运动轨迹。
4.选择 "更新",看看能否用默认设置创建机器人程序。如果程序生成成功,你会看到一个绿色的复选标记。然后,你可以选择“模拟”或双击生成的程序,查看模拟是否开始。
在设置的右上方还有其他选项,例如工具速度以及是否必须对每条曲线应用趋近/回退移动。默认设置如下图所示:
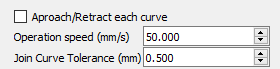
Note:除其他外,"程序事件 "设置还可更改进场和缩回运动时的运动速度。
该程序可利用机器人加工所示的相同功能进一步定义和优化。
从3D对象中提取特征
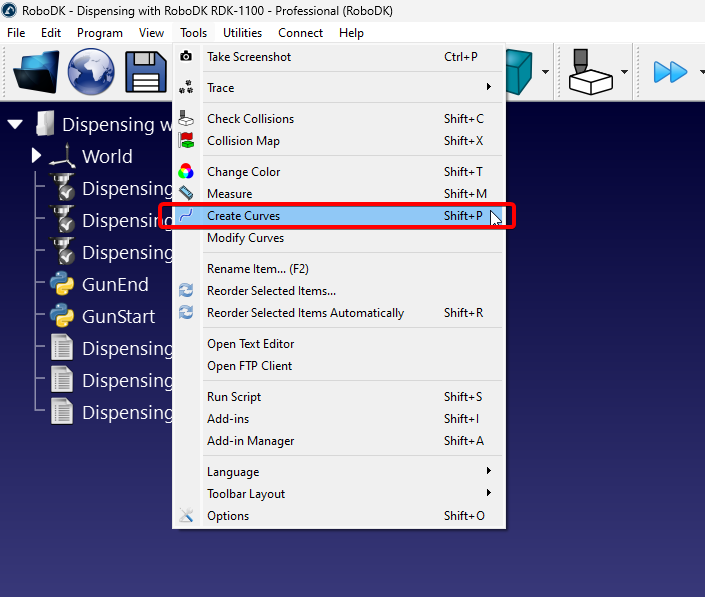
在主菜单中选择:工具➔ 创建曲线,就可以从3D对象特征中提取曲线。
RoboDK 窗口左侧将出现一个面板,只要该面板处于活动状态,且 "自动提取曲线"选项已启用,你就可以提取曲线。
Tip:若要从3D对象中提取特征并获得最佳效果,导入零件时应使用STEP或IGES格式的原始文件。
你可以将光标悬停在想要提取曲线的 3D 对象上。此时会出现一条纤细的浅蓝色线条,该线条即代表提取出的曲线。不同点位上的白色箭头表示曲线的法向量,这一方向也是工具(如机器人工具)将从中趋近的方向。
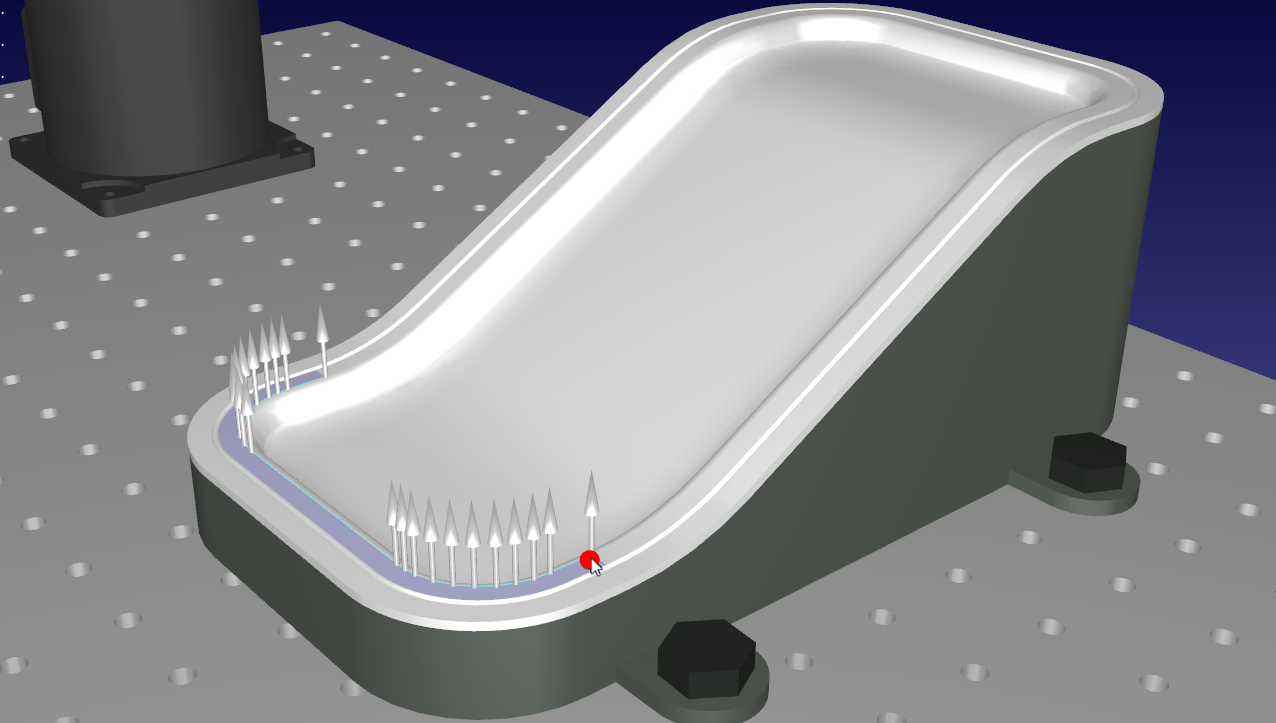
Note:RoboDK 会根据活动曲面自动提取精确描述曲线所需的最少点数。这些点的分辨率受物体CAD 导入设置影响。
你可以通过轻微上下或左右移动鼠标来改变曲线法线(进刀方向)的朝向。默认步进角度为15度,可以通过“创建曲线”面板上的“倾斜步长(度)”调整。
识别出正确的曲线后,无需移动鼠标直接点击它。重复此操作,直到选中要在曲线跟随项目中使用的所有曲线。
Note:RoboDK为普通物体、包含曲线的物体以及仅含曲线的项目(无3D模型或曲面的对象)设置了不同的图标。你可能需要刷新项目的可见性才能看到这一变化。
RoboDK提供多种工具帮助你在提取曲线后仍能进行修改。若只需调整法线方向,可通过"工具➔修改曲线"功能实现。此功能允许你更改任意已创建曲线的法线朝向。
导入曲线
RoboDK 可以从多种来源创建或获取曲线。以下列举的工具示例均可生成适用于曲线跟踪项目的曲线:
a.从导入 RoboDK 的 3D物体中提取特征
c.使用CAD/CAM 插件导入曲线
e.使用使用表面图案生成器应用程序
f.使用RoboDK API 与外部应用程序集成
g.使用手部探头,例如RoboDK TwinTrack
导入CSV文件
在RoboDK中,选择“实用工具➔导入曲线”,打开CSV或文本文件。导入后,工作站中将新增一个显示曲线对象的项目。
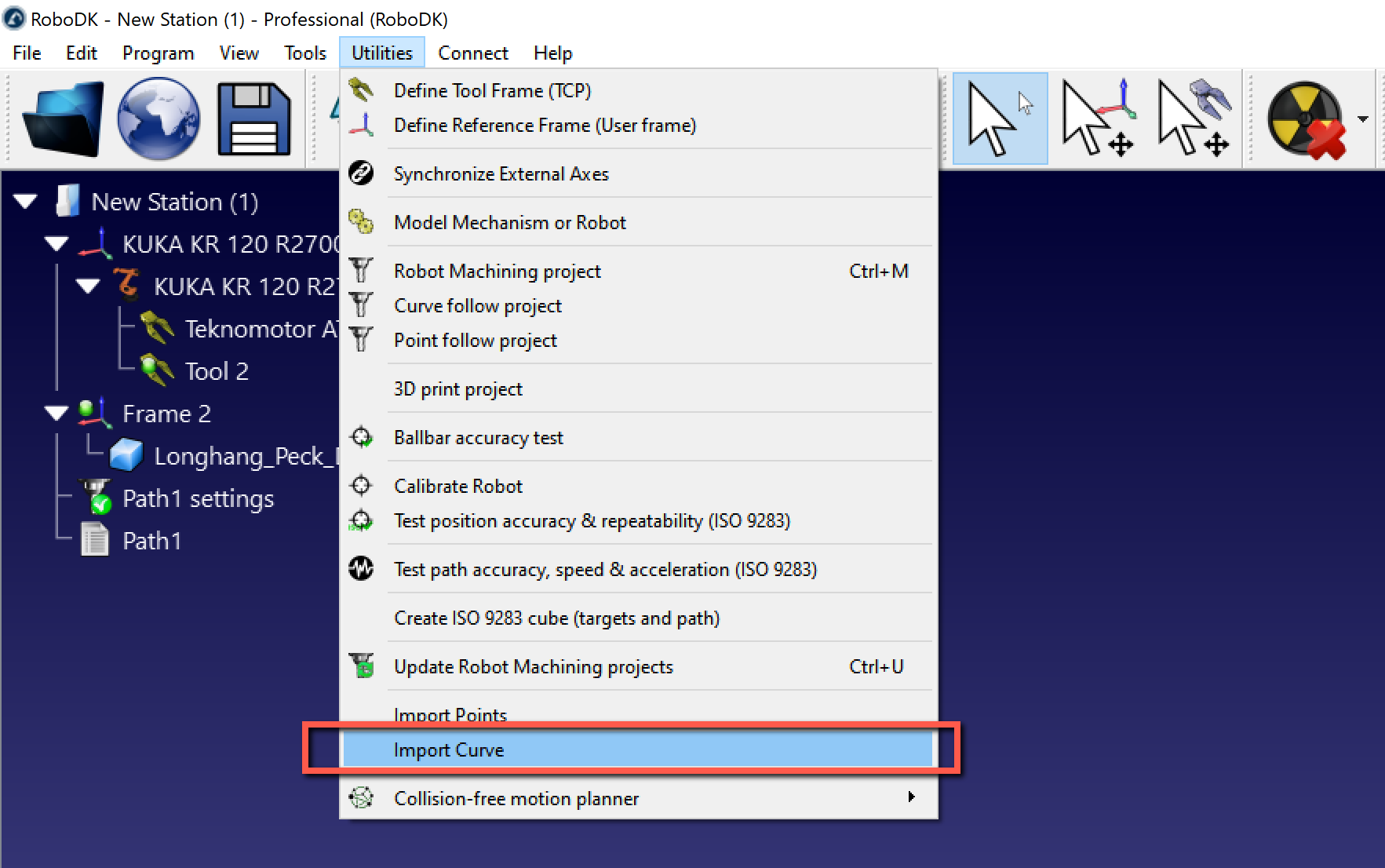
Tip:将 CSV 文件(.csv 格式)拖放到 RoboDK 的主窗口,即可自动将该文件作为曲线导入。
该文件可以是一个文本文件,包含曲线上每个点的3D坐标。可选择以 i、j、k 向量的形式提供工具 Z 轴的方向。所有坐标必须相对于零件的坐标系。
Note:在 RoboDK 中加载STEP 或 IGES 文件时,可自动提取物体边缘(更多信息请参阅STEP/IGES 导入)。
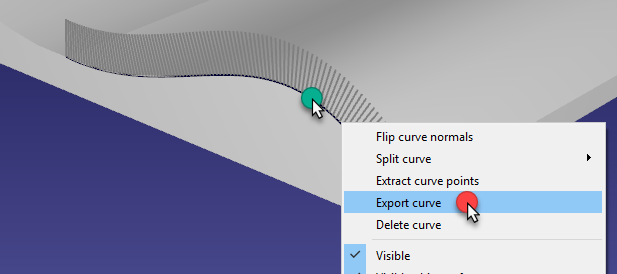
可以选择将物体的现有曲线导出为 CSV 文件(右键单击曲线,然后选择导出曲线),修改后重新导入 RoboDK。
有关如何自定义导入 CSV 或 TXT 文件作为曲线或点的更多信息和范例,请参阅RoboDK API 的范例。