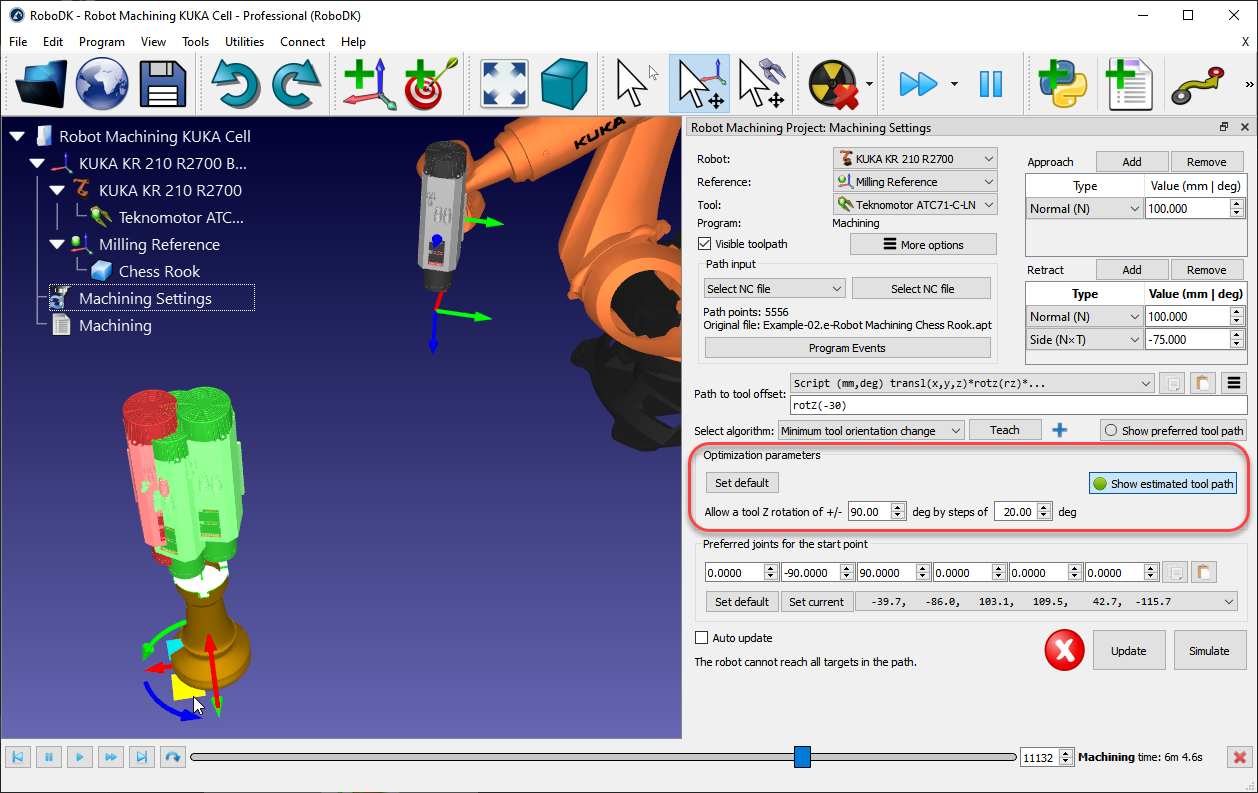
优化参数
在设定刀具首选方向后,机器人可拥有绕工具Z轴一定范围内的旋转自由度。这一功能使机器人能够通过调整工具角度来规避奇异点和关节限位,并确保所有路径点均可到达。默认情况下,RoboDK允许工具绕TCP轴旋转±180度,并以20度为增量进行调整。
建议根据应用情况对旋转进行限制。例如,可以输入 +/-90 度,将允许的旋转限制为一半。减少该参数还可以缩短获取程序的处理时间。
Tip: 选择显示预估的工具路径,可查看可达点(绿色)和不可达点(红色)。为满足机器人可达性,系统可能对可达点进行旋转调整,使其偏离预设刀具路径。
如果路径中的某些点无法到达,建议旋转参考坐标系或放宽工具Z轴旋转的限制。可通过按住Alt键并拖动坐标系来移动参考框架,使其更好地适配机器人工作空间内的零件。
Note: 当修改参考坐标系或 TCP 时(如果选中自动更新选项),将显示估计刀具路径。这可以指导你找到机器人加工操作的最佳位置。
Tip:步长值越小,工具在穿越奇点时的方向调整就越渐进。另一方面,计算刀具路径可能需要更长的时间。
Note:将绕Z轴的允许旋转角度设置为0度,可根据首选方向完全约束工具。对于机器人工作在远离奇异点或轴限位的简单应用场景,也可将此旋转角度设为0度。该设置尤其适用于大型3D铣削应用,此时工具通常需保持固定方向。