机器加工项目
请按照以下步骤在 RoboDK 中创建一个机器加工项目,导入一个通过 CAM 软件生成的 NC 文件(如 G 代码或 APT):
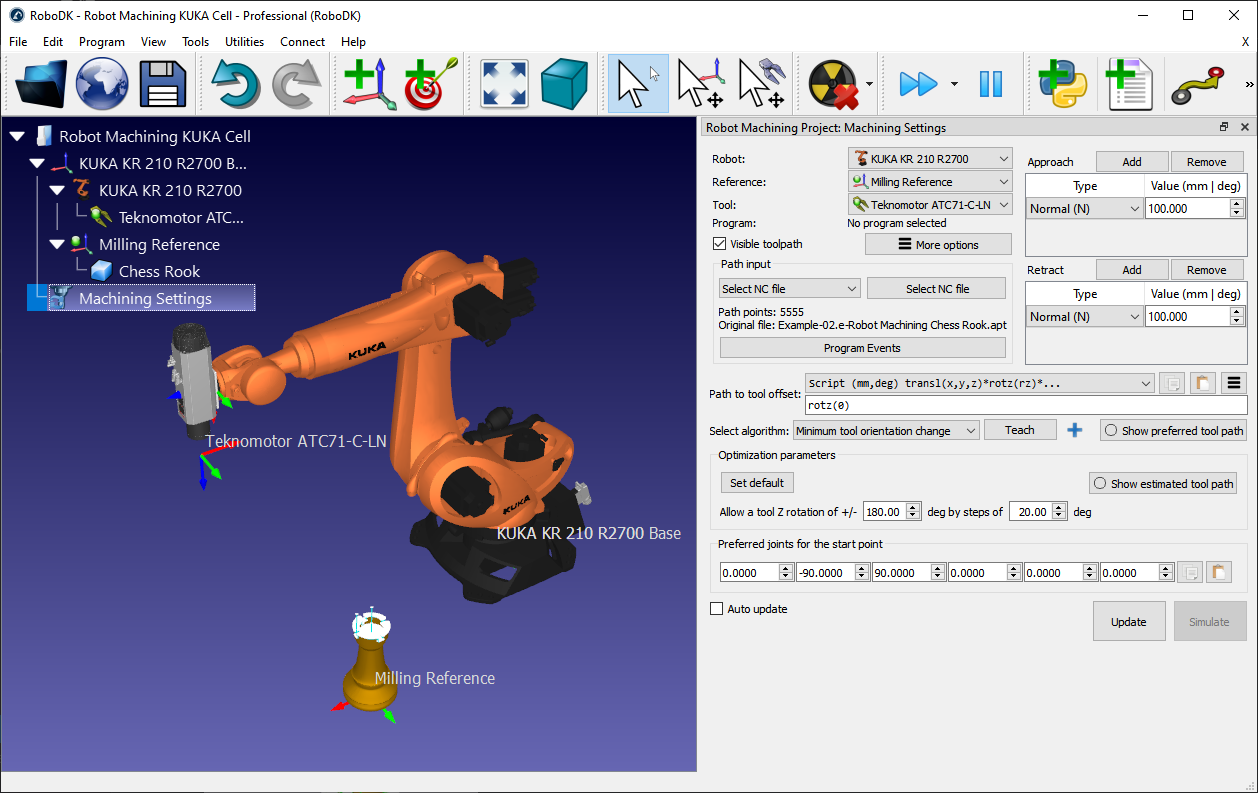
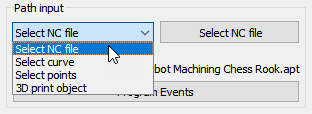
1.选择实用程序➔
如图所示,将弹出一个新窗口。
2.在路径输入旁点击 "选择 NC 文件
3.提供 NC 文件,例如以下 APT 机器加工文件:
C:/RoboDK/Library/Example-02.e-Robot Machining Chess Rook.apt
4.右键单击树中的新项目并选择重命名(F2),此处命名为Machining Settings,完成机器人加工项目的重命名。
Tip:直接加载 NC 文件以自动设置项目。你也可以将文件拖放到 RoboDK 窗口。
Note:你可以选择将窗口停靠在窗口的左边或者右边,窗口最终会固定在那个位置。
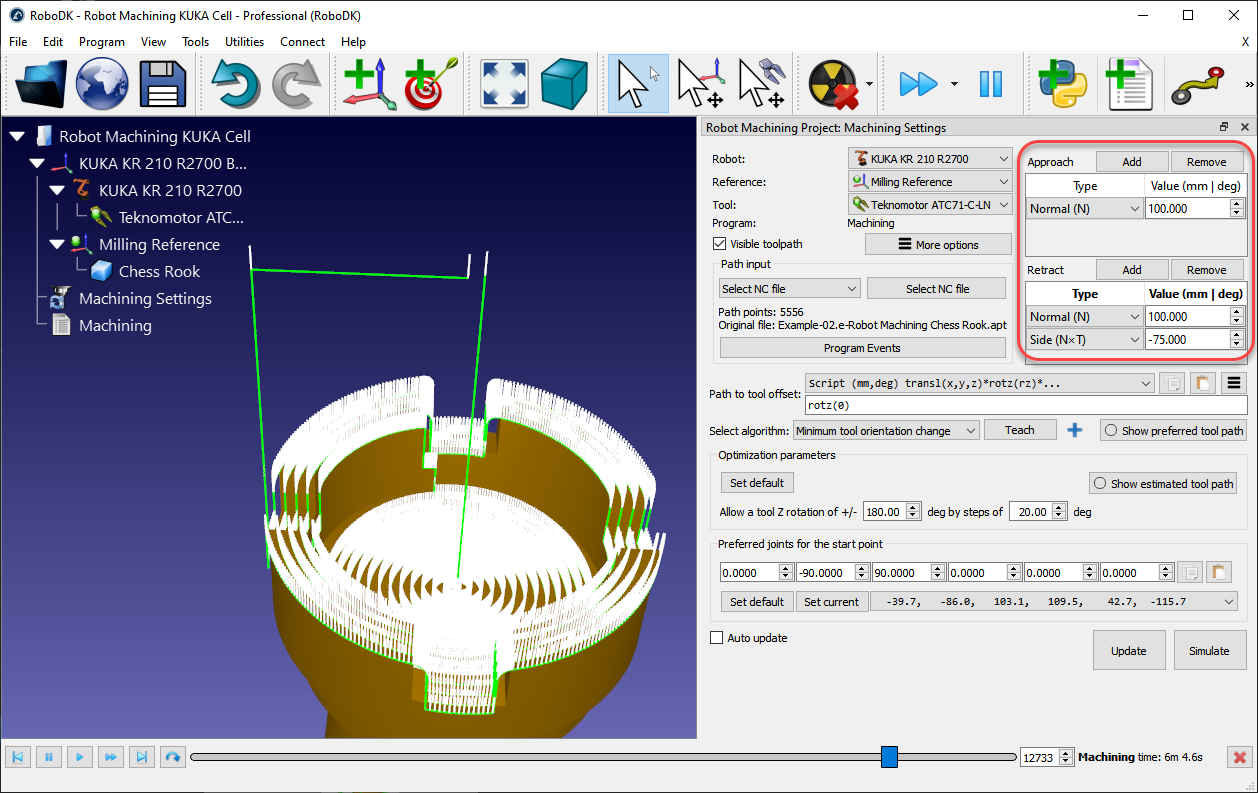
在菜单左上方选择机器人、参考坐标系和工具,如下图所示。相对于正确的坐标系,刀具路径应显示为绿色。
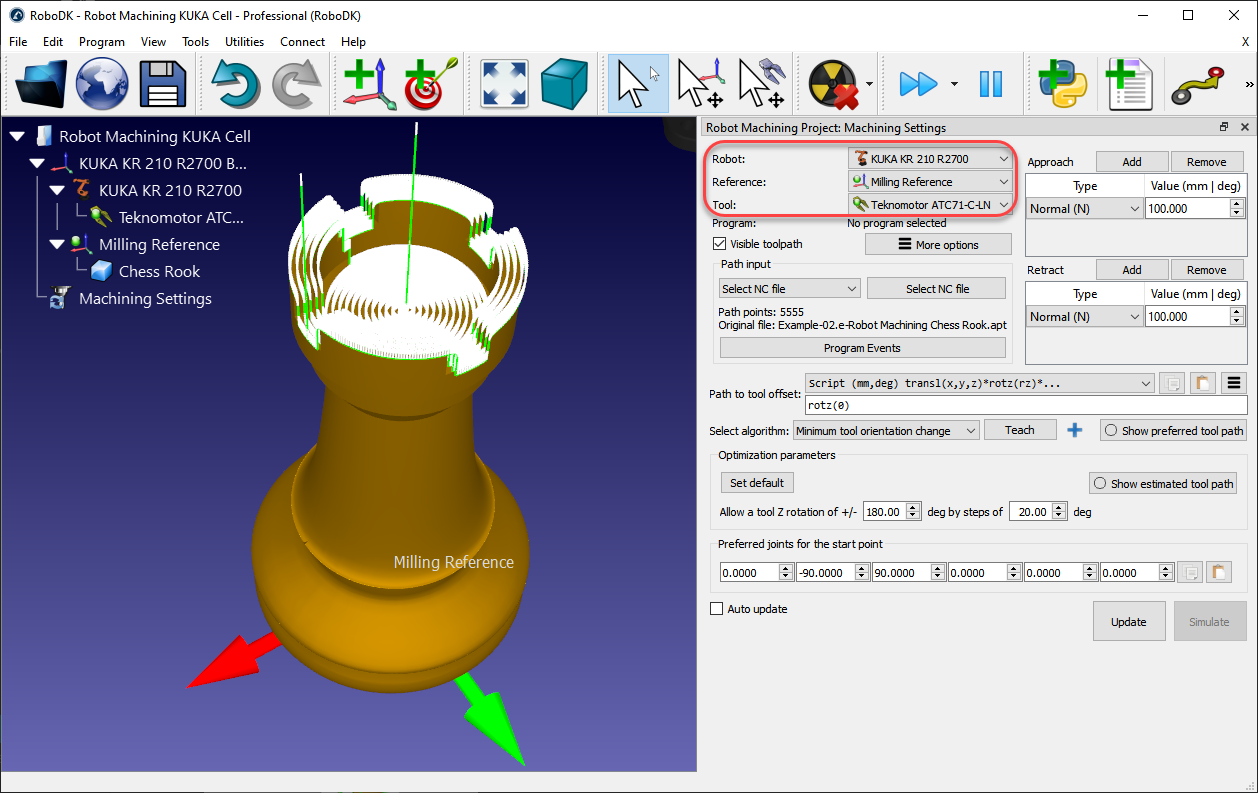
加工刀具路径以绿色显示,路径法线以白色矢量表示。取消勾选“工具轨迹可见”可隐藏刀具路径。
Tip:你可以在工具选项窗口,将某个工具(TCP)设置为相对于另一个 TCP 的偏移。这一功能非常实用——例如,当你以某个工具作为基准时,可通过长度偏移量快速校准其他工具。
Note:物体相对于参考系的定位必须与加工刀具路径相匹配。如不符合,需将物体参考系与加工参考系对齐,以确保实际装夹时可准确定位参考基准。
你可以选择 "更新"来查看是否可以使用默认设置创建机器人加工程序。如果程序生成成功,你会看到一个绿色的勾选标记。然后,你可以选择“模拟”或双击生成的程序来启动程序。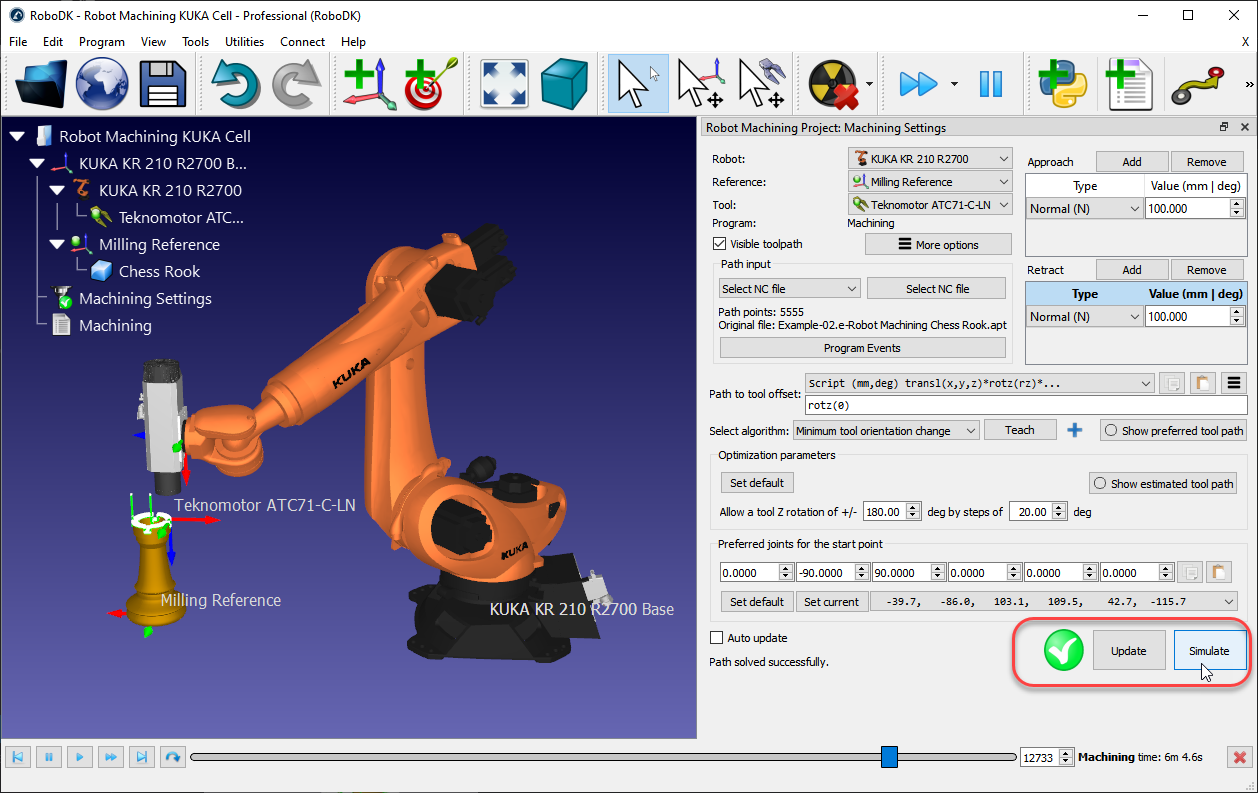
如果你看到带有警告信息的红叉,这意味着你的机器加工程序不可行。你可能需要更换刀具方向、优化参数、起始点或工件位置等设置。
以下部分提供有关如何自定义机器人加工设置的更多信息。
路径输入
路径输入功能支持不同的提供刀具路径的方式。
●选择NC文件:如本节所述,需要一个从 CAM 软件生成的NC 文件。
●选择曲线:如曲线跟踪项目所述,作为一条或多条曲线。
在 RoboDK 中可以将曲线导入作为坐标列表。
●选择点:一个或多个点,如点跟踪项目部分所述。
可以在 RoboDK 中以坐标列表的形式导入点。
●3D 打印物体:作为 3D 打印的物体。使用切片器将几何图形转换为刀具路径
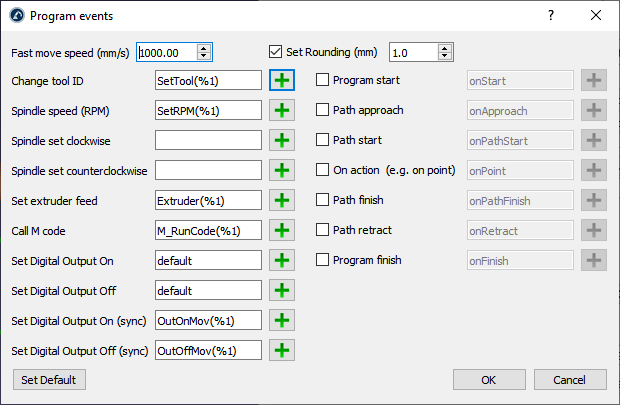
程序事件
选择程序事件,出现一个显示生成机器人程序时考虑特殊事件的窗口。包括触发刀具更换、设置主轴转速(RPM单位),在程序开始/结束时触发特定程序。
你可以在程序事件中设定精度值。这将在程序开始时自动创建一个圆滑过渡指令,有助于使机器人加工程序运行更加流畅,避免机器人抖动。例如,在 ABB 机器人上,该值以毫米为单位设置 ZoneData 参数;在发那科(Fanuc)机器人上,这将以百分比%为单位设置 CNT 参数;在优傲(Universal Robots)控制器上,这将以毫米为单位设置路径混合参数。
如果你使用的是 G 代码或者NCI 文件,自定义 M 代码将默认作为 M_RunCode 的函数调用触发(M 代码作为参数传递)。你可以通过删除对 M_RunCode 的调用来移除自定义 M 调用。
将鼠标光标移至相应字段,了解更多信息,自定义每个部分。
例如,在更换刀具时,可以使用 %1 值来表示 CAM 软件提供的刀具 ID。如果你更喜欢触发静态函数而不是传递参数,可以用SetTool%1 代替SetTool(%1)。当使用刀具 2 时,将生成 SetTool2 而不是 SetTool(2)。
Note:你可以通过选择工具-选项-CAM-程序事件来更换默认事件。
Tip:你还可以使用后处理器自定义和过滤程序调用(后处理器的 RunCode 功能将处理程序调用或从程序事件中创建的自定义代码输入)。
趋近/回退
你可以在机器加工菜单右上方自定义趋近和回退运动。默认情况下,RoboDK会沿法线方向添加100毫米的趋近和回退路径。
Note:默认正常设置位置在工具➔ 选项➔CAM中自定义。
选择 "+"可添加额外的缩放动作。绿色路径将相应更新。可以选择沿特定轴移动、提供坐标、弧形接近等。你还可以通过选择 "+ "按钮来组合多个进场/缩场动作。
点击 "- "按钮可移除特定的趋近或回退动作。
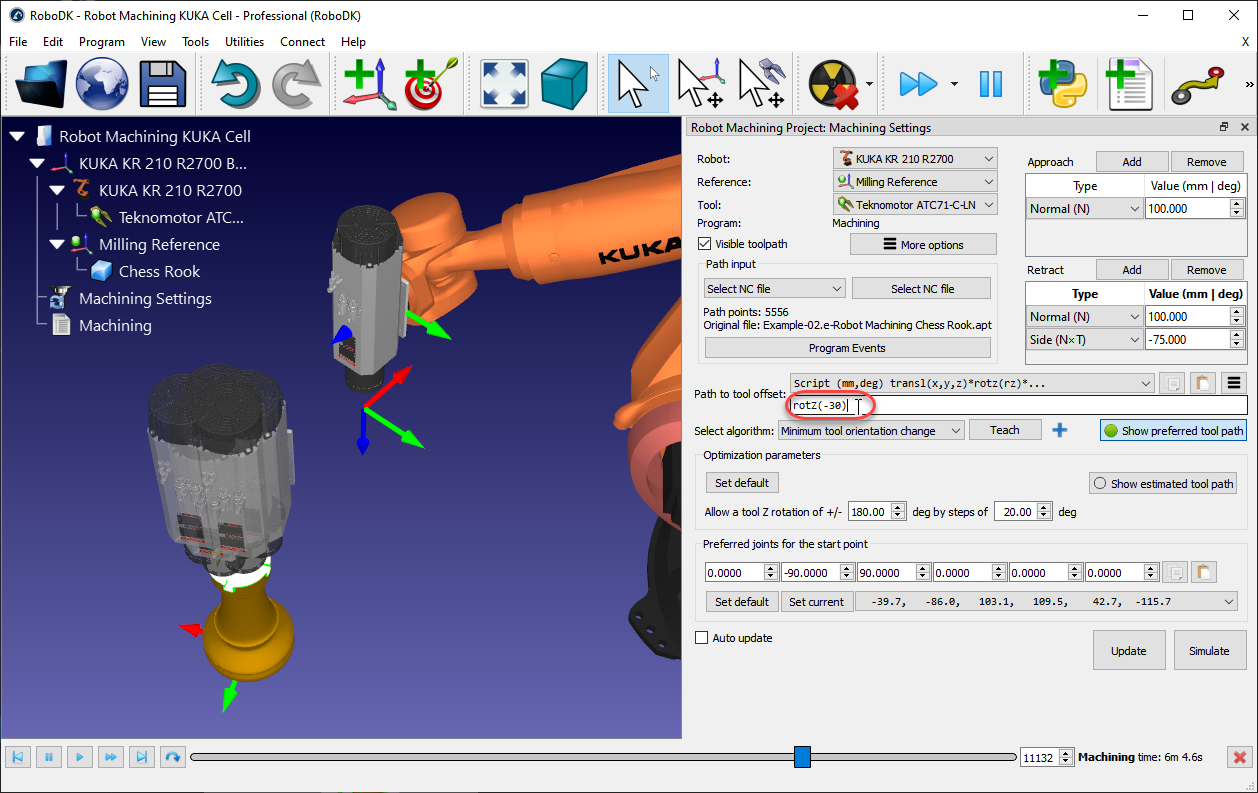
工具偏移路径
刀具路径偏移允许沿刀具路径更换刀具的首选方向。该选项主要用于让刀具绕TCP(工具中心点)的Z轴旋转。从而实现对工具轴(第 6轴)自由度的控制。根据应用需求,系统提供多种选项。例如,可选择最小的刀具姿态变化,或工具姿态跟随路径。
Note:大多数机器人加工设置中,Z轴沿切削轴线方向朝外延伸。默认情况下,刀具的Z轴将与刀路法向保持一致。
由于使用六轴机器人来执行三轴或五轴CNC加工程序时存在一个额外的自由度需要定义,该自由度通常为工具中心点(TCP)绕Z轴的旋转。这一额外自由度对于避免奇异点、关节限位、碰撞或可达性问题尤为有用。
Tip:将机器人移动到程序中的所需点,或与机器人一起移动到所需方向,然后选择设计。你可以按住Alt 键,拖动 TCP 的蓝色圆箭头,绕工具的 Z 轴旋转。此操作将更新默认设置,使刀具路径中的方向与你所需的方向一致。
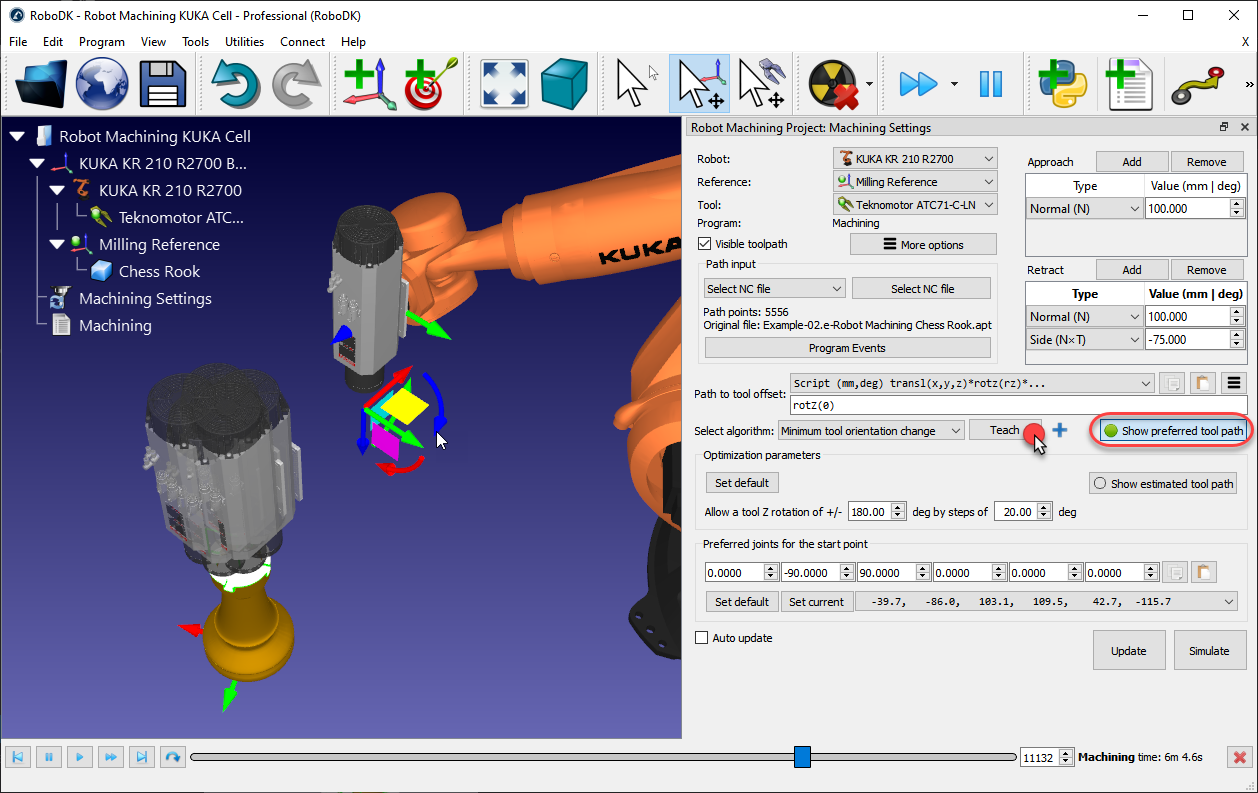
默认情况下,工具路径偏置功能会显示一个 rotz(0) 变换(即绕工具Z轴旋转0度)。这意味着你可以额外添加一个绕工具Z轴的旋转角度。通过修改该值,可以设定刀具的首选方向,调整工具中心点(TCP)绕Z轴或其他组合轴的方向。首选方向是机器人在沿刀具路径运动时,会尽量保持的工具姿态。
Tip:选择 "显示优选的工具路径",然后在 "路径对于工具的偏移 "上移动鼠标滚轮,即可快速预览机器人刀具路径。
Tip: 参考坐标系部分提供了有关输入位置和方向的其他方法的更多信息。
默认情况下,RoboDK 使用最小的刀具姿态变化算法。这意味着沿刀具路径尽可能保持刀具方向不变。一般来说,该选项适用于铣削操作,因为它能最大限度地减少机器人关节的运动。另外,还有其他算法可供选择,例如工具姿态跟随路径(适用于切割应用,刀片需要沿路径保持相切),或者如果刀具路径需要跟随附着在机器人刀具上(例如,用于分发或抛光应用,也称为远程 TCP 配置),则由机器人抓住物体。
Tip:选择 "显示优选的工具路径 "按钮,可以立即看到方向改变后的结果。
Tip:当光标位于rotz(0) 文本上方时,使用鼠标滚轮可逐步修改方向。
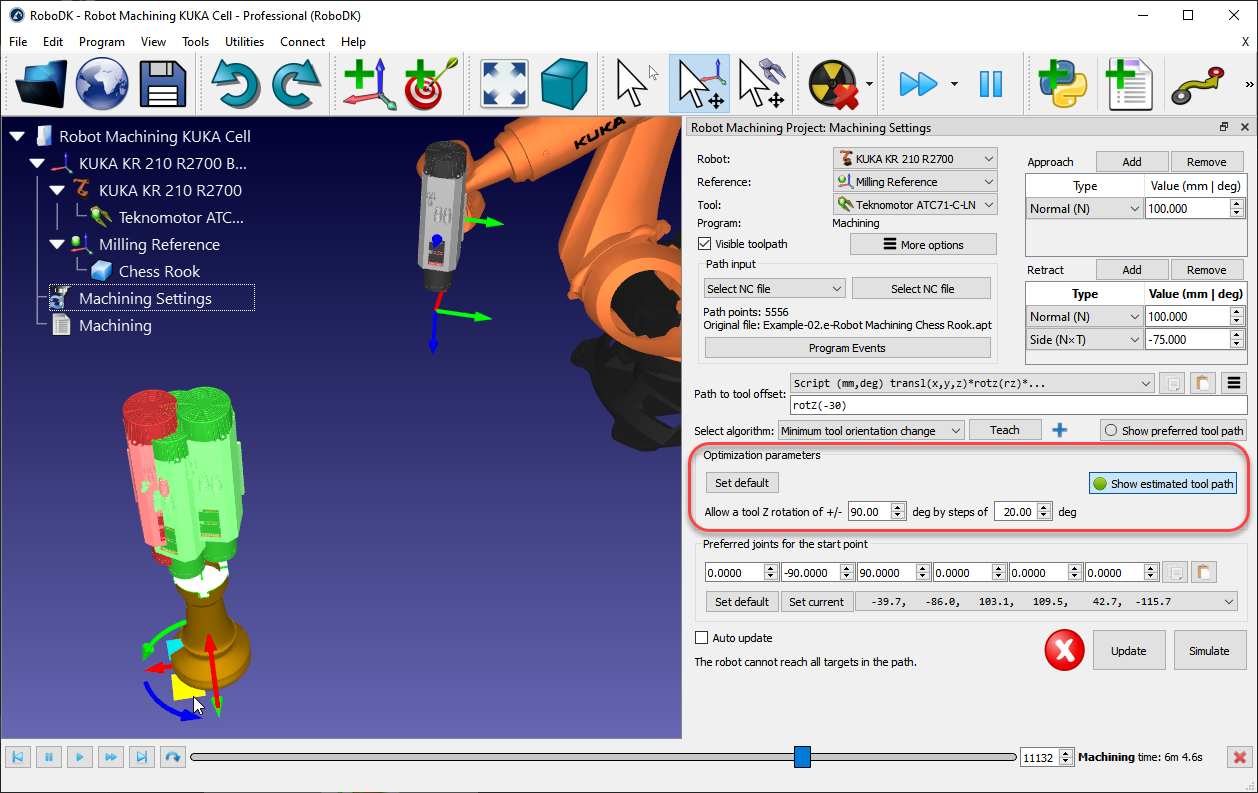
优化参数
在设定刀具首选方向后,机器人可拥有绕工具Z轴一定范围内的旋转自由度。这一功能使机器人能够通过调整工具角度来规避奇异点和关节限位,并确保所有路径点均可到达。默认情况下,RoboDK允许工具绕TCP轴旋转±180度,并以20度为增量进行调整。
建议根据应用情况对旋转进行限制。例如,可以输入 +/-90 度,将允许的旋转限制为一半。减少该参数还可以缩短获取程序的处理时间。
Tip: 选择显示预估的工具路径,可查看可达点(绿色)和不可达点(红色)。为满足机器人可达性,系统可能对可达点进行旋转调整,使其偏离预设刀具路径。
如果路径中的某些点无法到达,建议旋转参考坐标系或放宽工具Z轴旋转的限制。可通过按住Alt键并拖动坐标系来移动参考框架,使其更好地适配机器人工作空间内的零件。
Note: 当修改参考坐标系或 TCP 时(如果选中自动更新选项),将显示估计刀具路径。这可以指导你找到机器人加工操作的最佳位置。
Tip:步长值越小,工具在穿越奇点时的方向调整就越渐进。另一方面,计算刀具路径可能需要更长的时间。
Note:将绕Z轴的允许旋转角度设置为0度,可根据首选方向完全约束工具。对于机器人工作在远离奇异点或轴限位的简单应用场景,也可将此旋转角度设为0度。该设置尤其适用于大型3D铣削应用,此时工具通常需保持固定方向。
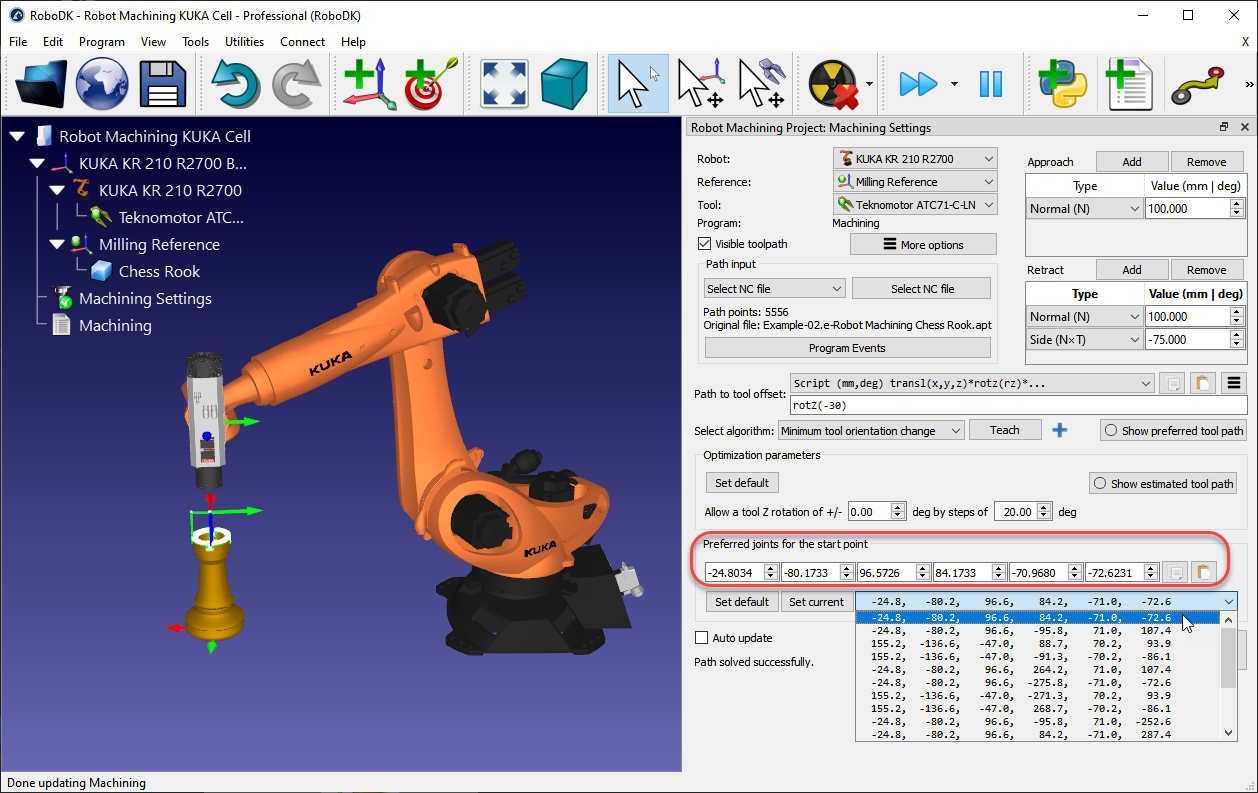
首选配置
RoboDK 会自动选择起点的首选关节的初始配置。从该点开始,机器人将执行线性运动,因此其关节配置不会发生改变。
下拉菜单将显示启动程序的所有可能方案。如有需要,可选择首选的机器人关节配置,然后选择 "更新 "重新计算程序。
程序界面会以下拉菜单形式显示所有可能的起始关节解。如需调整,可选择偏好的机器人关节配置,并点击更新,重新计算程序。
Tip:该选项允许你创建具有特定配置的程序,如非翻转、肘部向上和前旗。如果需要在轨迹前预绕一个多转关节(如关节 6),这也特别有用。然后,该关节将在路径过程中松开,而不会达到其极限,从而使该轨迹完全一次性完成。
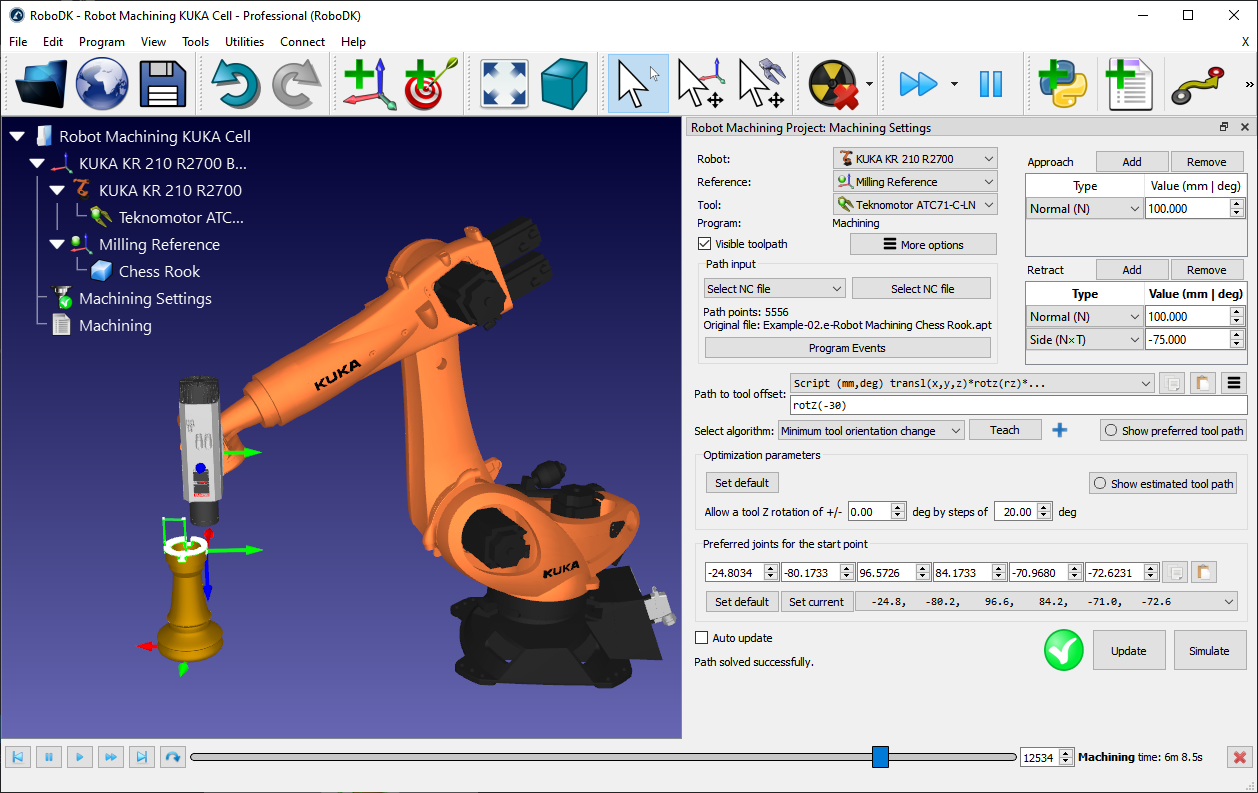
更新程序
点击"更新"按钮,根据当前设置生成机器人加工程序。若程序可成功创建,将显示绿色勾选标记。随后工作站内会出现一个名为"Machining"的程序。
双击生成的
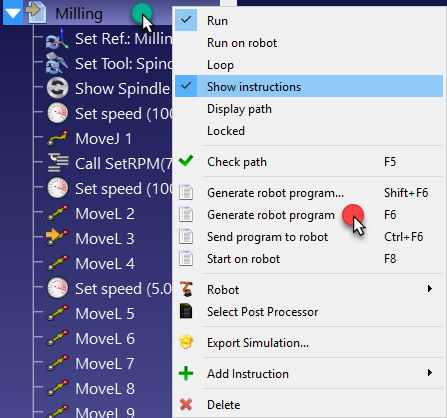
右击程序,选择生成机器人程序(F6),生成机器人程序。更多信息,请参阅程序。
Note:默认情况下,RoboDK 隐藏程序的指令。右键单击程序并选择显示指令,即可查看指令列表。黄色箭头显示程序是否正在模拟以及正在执行的指令。