首选配置
RoboDK 会自动选择起点的首选关节的初始配置。从该点开始,机器人将执行线性运动,因此其关节配置不会发生改变。
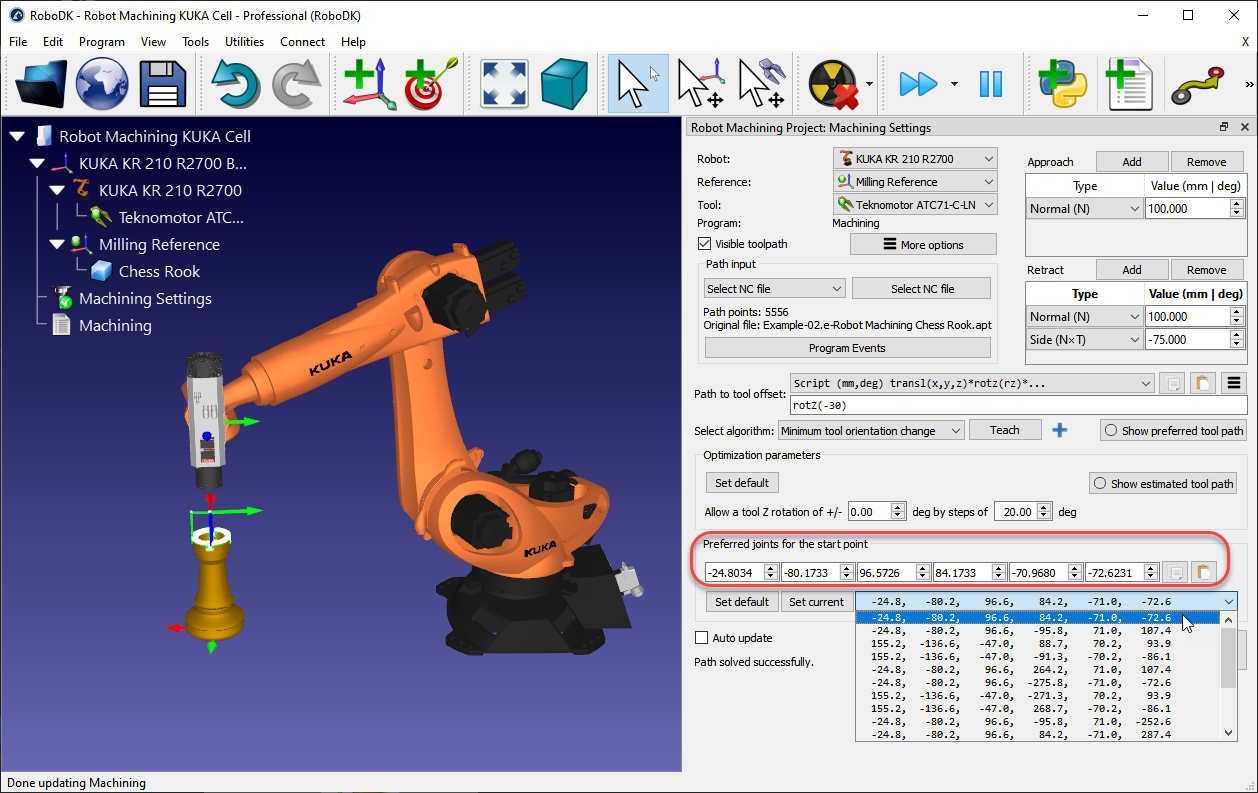
下拉菜单将显示启动程序的所有可能方案。如有需要,可选择首选的机器人关节配置,然后选择 "更新 "重新计算程序。
程序界面会以下拉菜单形式显示所有可能的起始关节解。如需调整,可选择偏好的机器人关节配置,并点击更新,重新计算程序。
Tip:该选项允许你创建具有特定配置的程序,如非翻转、肘部向上和前旗。如果需要在轨迹前预绕一个多转关节(如关节 6),这也特别有用。然后,该关节将在路径过程中松开,而不会达到其极限,从而使该轨迹完全一次性完成。