点跟踪项目
使用 RoboDK,你可以轻松模拟机器人沿点轨迹运动的功能。RoboDK 中的点可以从物体、曲线中提取,或通过CSV文件导入点坐标列表。该功能特别适用于点焊或钻孔等应用场景。以下视频演示了如何设置点焊应用:观看Video。
Note:大多数 CAD 软件的 RoboDK 插件会自动创建点,并在点跟踪项目中选择这些点。在这种情况下,你可以按照机器人加工部分所示配置机器人刀具路径。
Tip:点可带有法向量,该向量将与工具Z轴对齐(通常垂直于表面)。
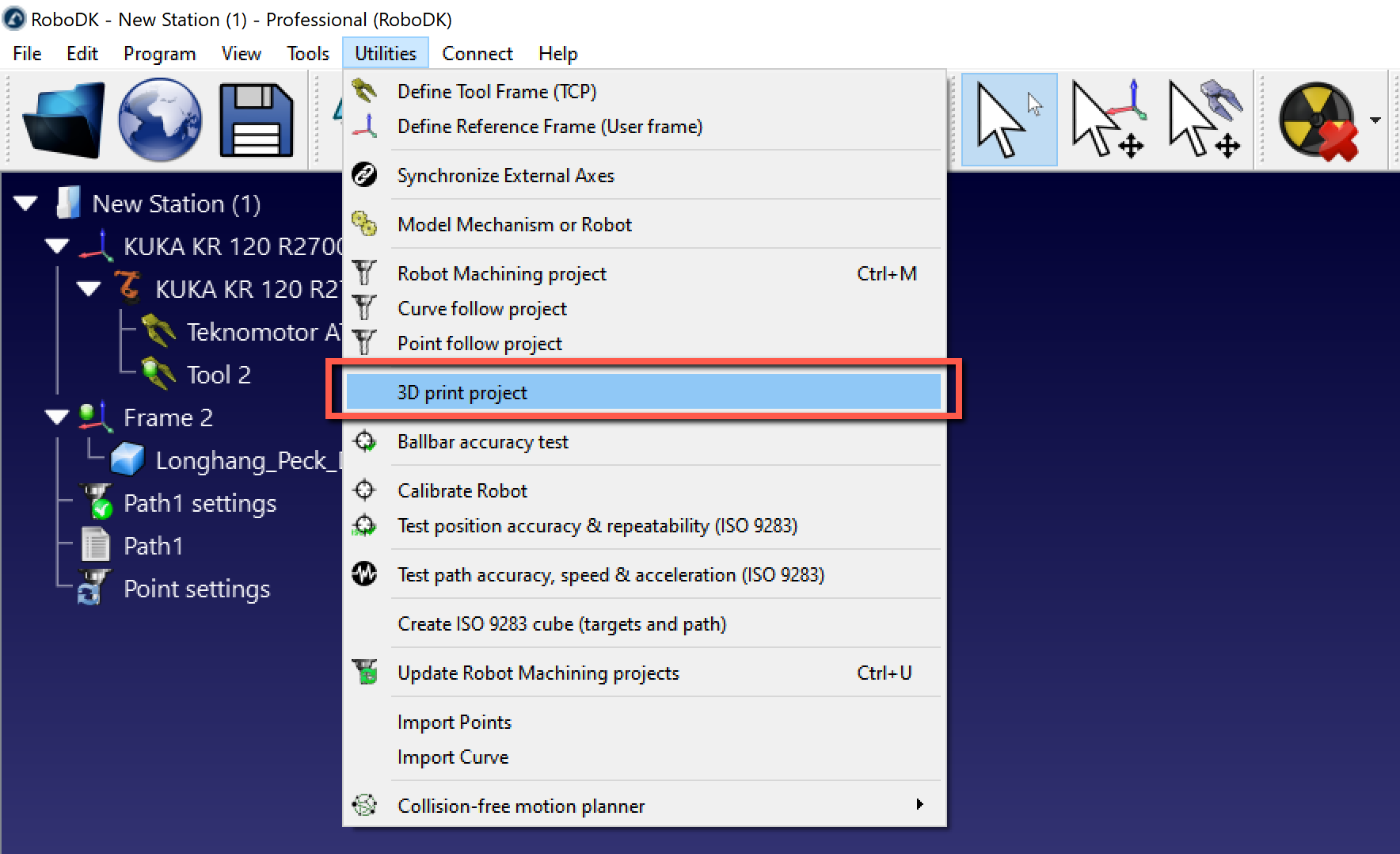
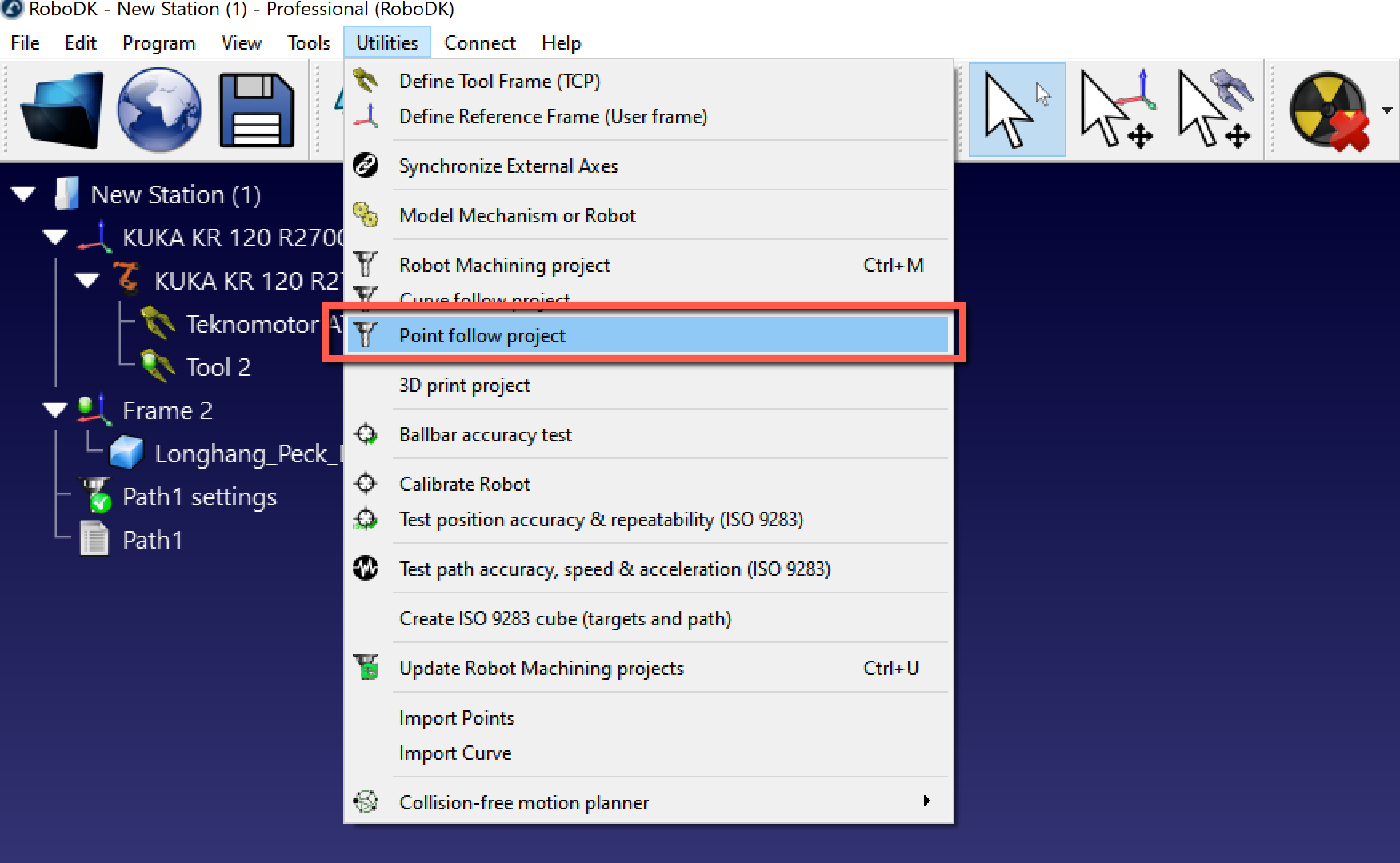
选择实用程序➔ 点跟踪项目,打开点跟踪设置。这些设置与机器加工项目相同,唯一不同的是路径输入预设为选择点。
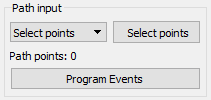
点击"选择点"后,选择屏幕上的点(或多个点)。
右键选择点。重复选择同一顶点可切换逼近方向。右键点击某顶点后选择“选择下一个”,可选中后续相连的顶点。
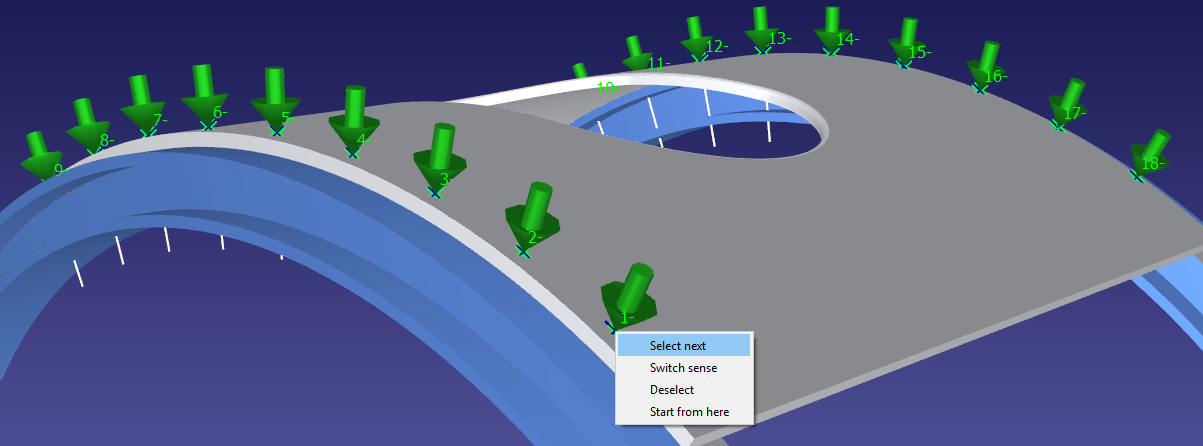
Note:运动顺序以绿色数字显示。
Tip:若点之间距离过近,请选择工具➔选项➔显示,并降低点选灵敏度。
右键点击屏幕并选择“完成”或按Esc键返回设置菜单。绿色路径将显示机器人相对于物体的运动轨迹。
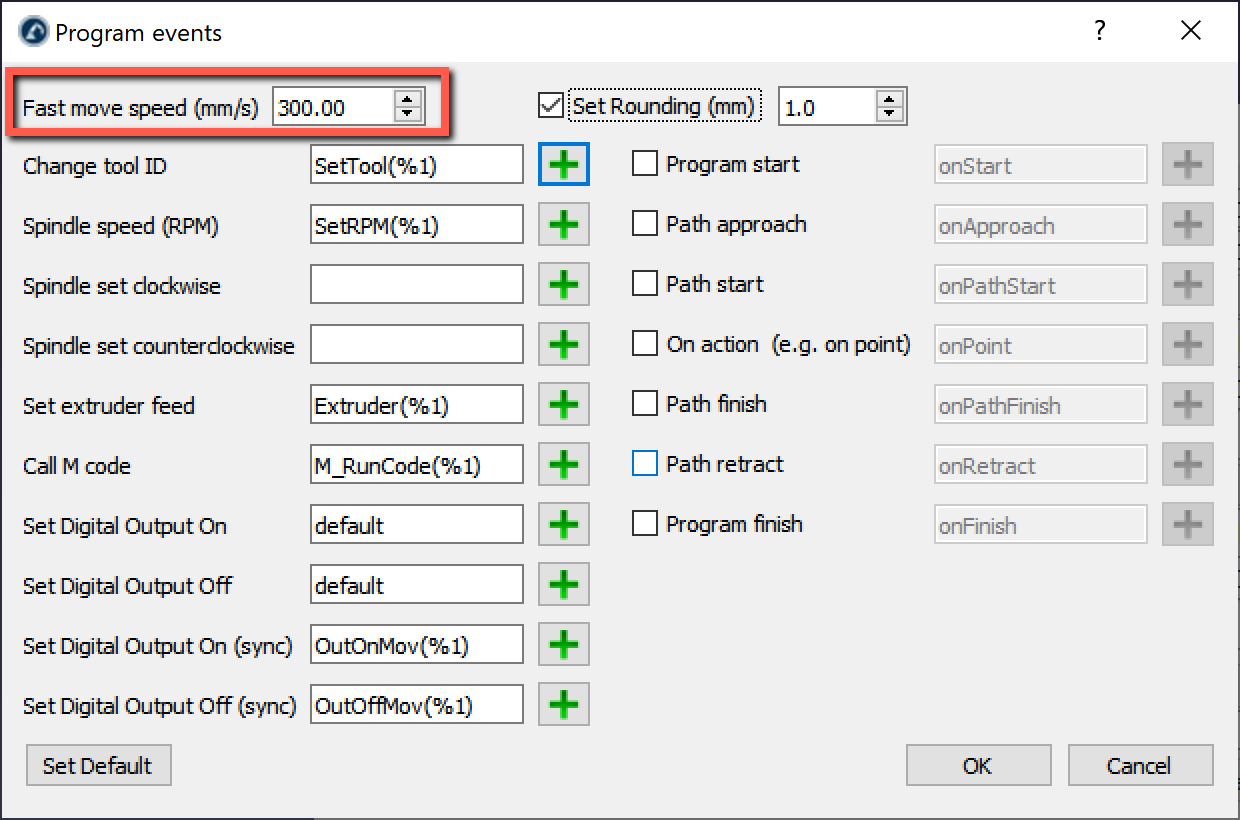
“设置界面的右上角还有一些额外选项,例如运行速度和接近点。默认设置显示在下一张图片中:”

Note:除其他外,"程序事件 "设置还可更改进场和缩回运动时的运动速度。
导入点
在主菜单栏选择:实用程序➔导入点,文件格式可以是文本文件,也可以是CSV文件。站点中将显示一个图标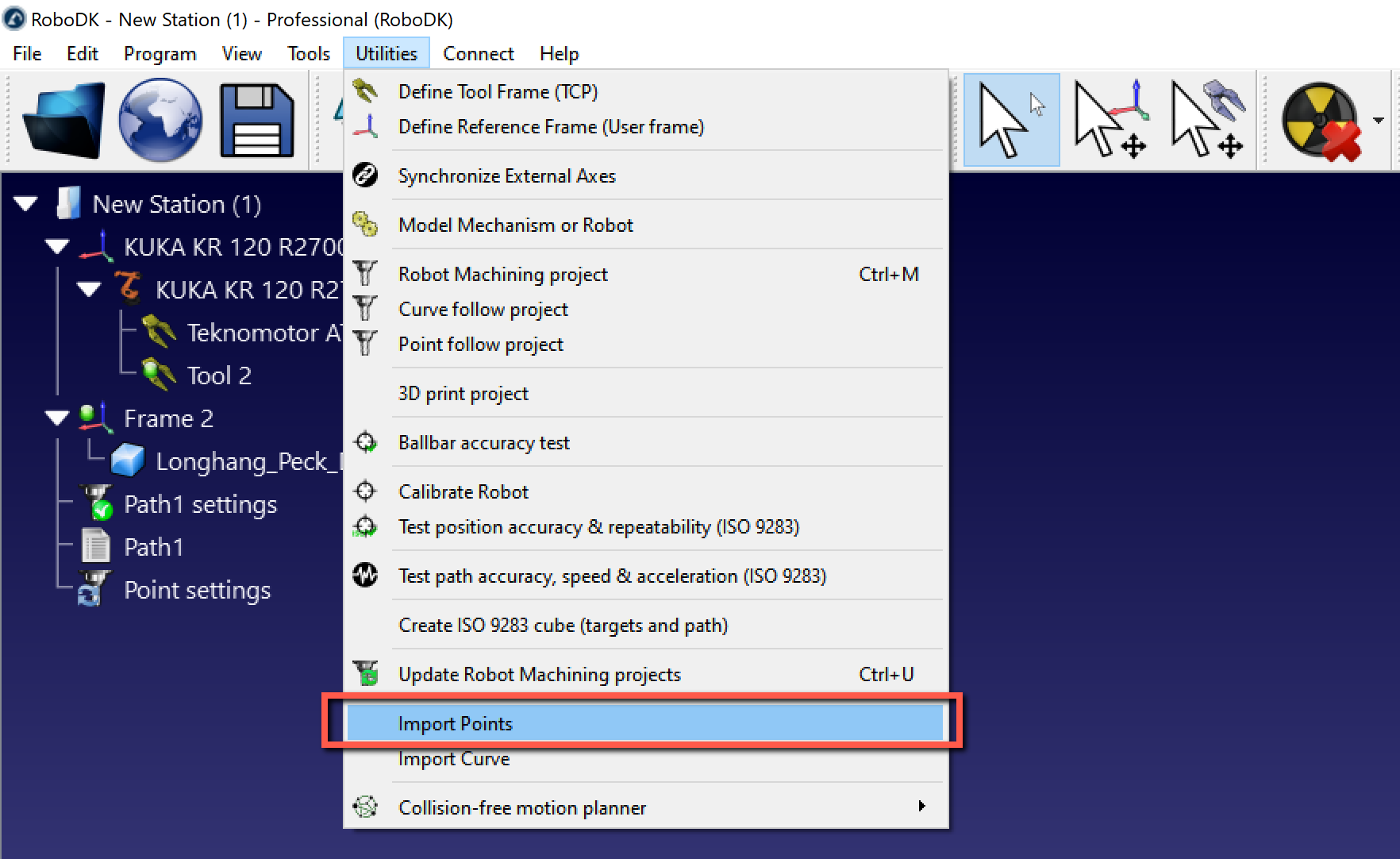
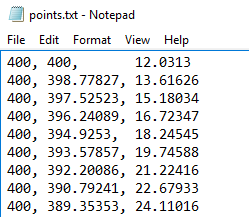
Tip:将文本文件(.txt格式)拖放到RoboDK窗口中,即可自动将其作为点列表导入。
该文件可以是包含曲线上各点3D坐标的文本文件。此外,还可选地提供一个表示工具Z轴方向的i、j、k向量。
Note:参数化物体文件(如 STEP 和 IGES 文件)中的点默认为自动导入(更多信息请参见STEP/IGES导入部分)。
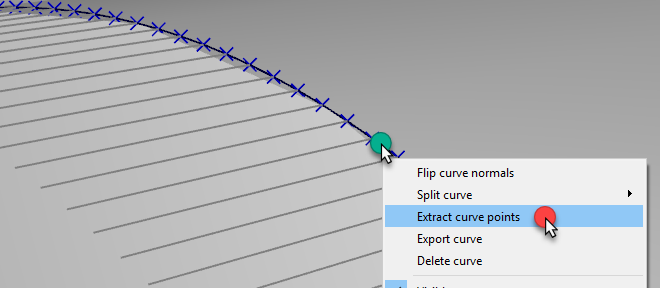
也可以选择将物体的现有曲线转换为点,方法是右键单击曲线,然后选择:提取曲线点。