夹持物体
可以在机器人手持对象/工具(如胶枪或抛光头)并执行制造操作(如点胶或抛光)的同时对其进行编程。这种技术适用于需要实时调整路径的场景,例如胶水喷涂或表面抛光等应用。此类机器人编程方式也被称为远程工具中心点(Remote TCP)编程。
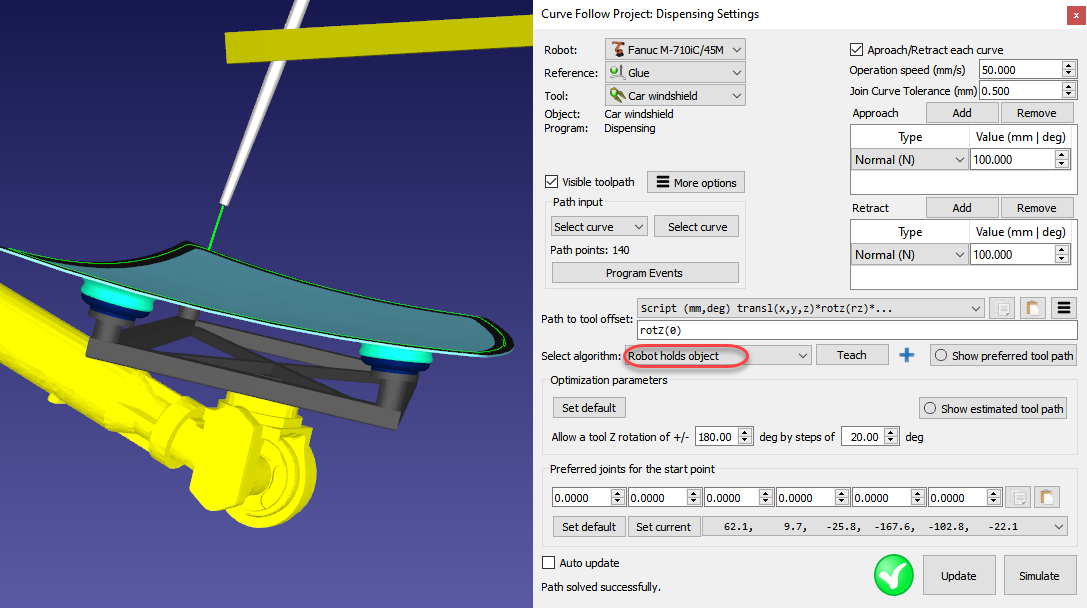
在 "选择算法 "下拉菜单中选择 "机器人保持物体",以便在 TCP 参考上正确放置刀具路径。其他设置与具有恒定工具方向的机器加工项目相同。
Important:如果工具(如胶枪或抛光头)的姿态(方向)需要改变,强烈建议将工具路径上的点位设置得彼此靠近。
Video:该范例展示了发那科(Fanuc)机器人分发胶水:https://www.youtube.com/watch?v=YrepmoQtNnA。
更多信息详见Autodesk Fusion插件 。