生成程序
当程序准备就绪可导出至机器人时,即可生成机器人控制器所需的程序文件。
请按照以下步骤生成机器人程序:
1.右键单击你的程序。
2.接着选择生成机器人程序 (F6)。
然后,你就会看到文本编辑器中显示的机器人程序。
Note:当选择一个或多个程序时,你也可通过菜单栏:程序➔生成程序(F6),可以生成一个或多个机器人程序。
Tip:按住Ctrl键,即可同时选择多个程序,并一次全部生成。
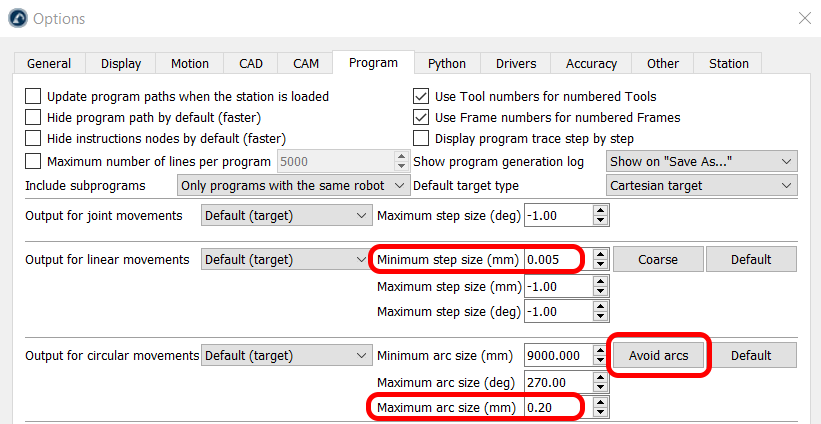
机器人程序默认保存在“文档”文件夹中(路径:C:/Users/用户名/Documents/RoboDK/Programs/)。如需修改该路径,请点击菜单栏:工具➔选项➔程序选项卡,点击:机器人程序文件夹右侧的设置按钮进行更改。
Note:对于某些机器人控制器而言,最佳实践是将生成的程序与所需子程序集成到同一程序文件中。RoboDK已自动处理这一细节——对于支持该功能的控制器(例如ABB、优傲Universal Robots或库卡KUKA控制器),你将在主程序中看到已包含的子程序。而对于不支持此功能的机器人(例如发那科Fanuc或安川Motoman控制器),则需要生成多个文件并传输至机器人控制器才能完整运行所有程序。部分后处理器支持对此行为进行配置,你可通过:工具➔选项➔程序选项卡查看更多设置。
另外,你也可以右键点击某个程序,并选择:生成机器人程序为…(Shift+F6),指定保存位置来生成程序。