选择程序➔ 关节运动指令,即可添加新的关节运动指令。或者,选择工具栏上的相应按钮。
关节运动指令,即可添加新的关节运动指令。或者,选择工具栏上的相应按钮。
如果在添加指令时没有选取目标点,该运动指令会自动创建新的目标点并与之关联。当目标点位置发生改变时,运动轨迹也会相应调整。
如果这是添加到该程序中的第一条指令,系统会在运动指令前自动插入两条额外指令:设置参考坐标系和设置工具坐标系。这将确保机器人执行到运动指令时,使用的参考坐标系和工具坐标系与创建该目标点时保持一致。
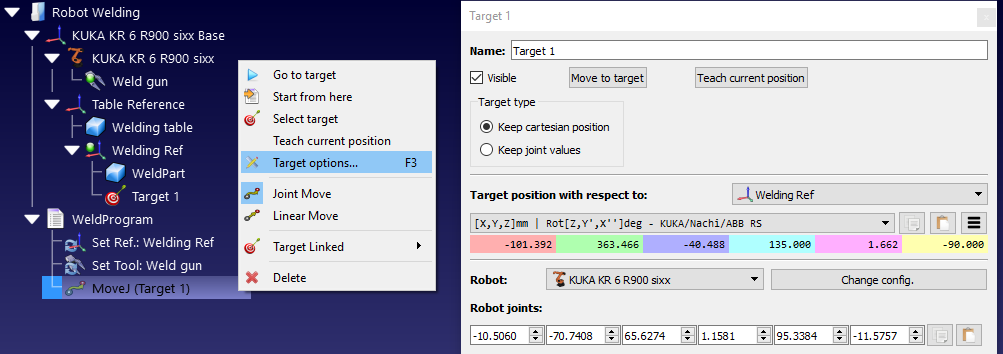
Note:右键单击运动指令并选择目标点选项… (F3)即可打开目标选项菜单。可从该窗口或直接于3D视图中修改该目标位置等信息。