线性运动
选择程序➔
如果在添加指令时没有选取目标点,该运动指令会自动创建新的目标点并与之关联。当目标点位置发生改变时,运动轨迹也会相应调整。
关节运动和直线运动的移动方式一样,可以从一种类型切换到另一种类型。
与关节移动指令相同,如果这是添加到该程序中的第一条指令,系统会在运动指令前自动插入两条额外指令:设置参考坐标系和设置工具坐标系。
Important:建议将每个程序的第一条运动指令保持为使用关节目标的关节运动。这将确保机器人在此后的运动中使用正确的位姿配置,并确保真实机器人的移动方式与仿真相同。
与关节运动不同,线性运动对机器人奇异点和轴限位非常敏感。例如,六轴机器人无法以直线轨迹穿越奇异点。下图所示案例中,由于关节5过于接近奇异点(0度位置),导致运动失败。[...] 此时建议改用关节运动方案,如下图所示。
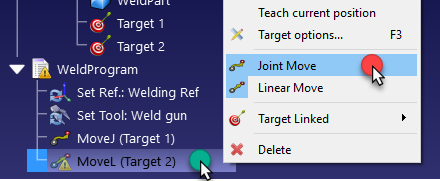
如果不是必要的线性运动,可以右键单击指令将其改为关节运动。

或者通过修改目标、TCP或参考坐标系的位置来避免奇点。