设置参考坐标系
选择程序 ➔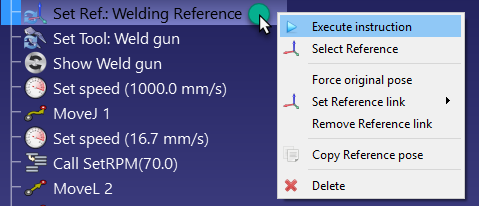
参考坐标系是一个变量名称,在ABB机器人中被称为Work Object,在发那科(Fanuc)机器人中称为UFRAME,在安川(Motoman)机器人中称为FRAME,在库卡(KUKA)机器人中则称为$BASE。

Note:特定控制器(比如Fanuc和Motoman控制器)支持使用编号设置参考坐标系。这表示参考坐标系的名称可以用数字结尾(例如Frame 4代表第4个参考坐标系)。
选择程序 ➔
参考坐标系是一个变量名称,在ABB机器人中被称为Work Object,在发那科(Fanuc)机器人中称为UFRAME,在安川(Motoman)机器人中称为FRAME,在库卡(KUKA)机器人中则称为$BASE。
Note:特定控制器(比如Fanuc和Motoman控制器)支持使用编号设置参考坐标系。这表示参考坐标系的名称可以用数字结尾(例如Frame 4代表第4个参考坐标系)。