后处理器与驱动器
后处理器与机器人驱动程序采用不同的方式控制机器人运动。后处理器支持离线生成程序,而驱动程序则能实现与机器人的实时通信。
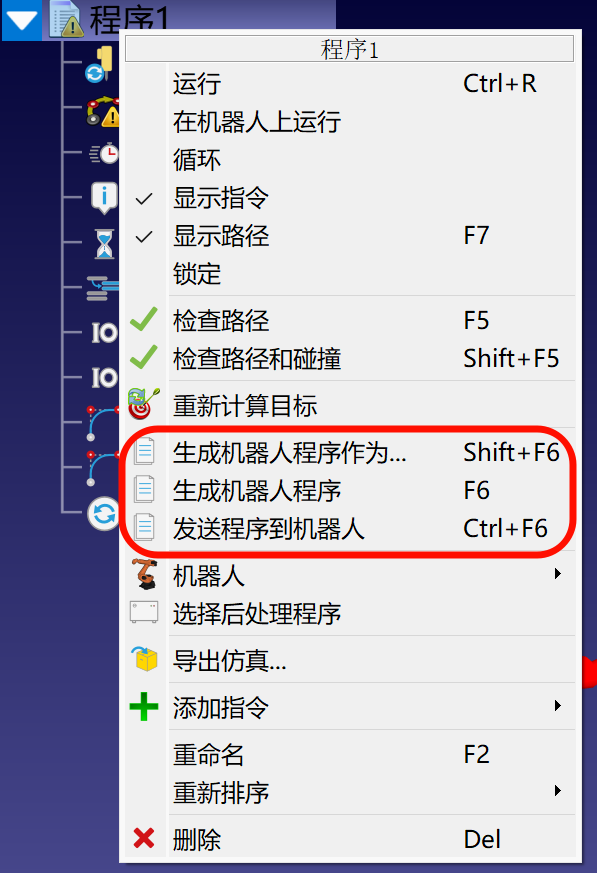
后处理器用于离线编程,其作用是将RoboDK机器人程序转换为对应机器人控制器的原生编程语言。例如,ABB后处理器会生成适用于IRC5控制器的.mod文件。后处理器还包含通过FTP等方式将程序上传至机器人控制器的功能。程序中的以下功能均由后处理器处理:
1.生成机器人程序
2.生成机器人程序作为...
3.发送程序到机器人
4.启动机器人(与驱动器结合使用)
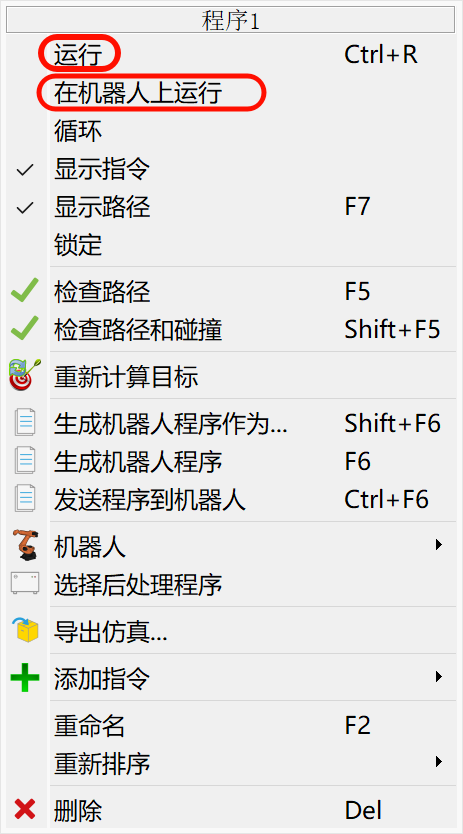
通过机器人驱动器,可以使用 RoboDK 从电脑远程控制机器人。该功能支持将RoboDK中的程序指令实时传输至机器人控制器执行,包括调用控制器上的远程程序。例如,ABB驱动程序通过套接字通信传输运动指令。该驱动程序可处理以下功能:
1.选择:在机器人上运行
2.然后双击程序,或选择:运行,即可通过驱动在机器人上运行。
Note:机器人驱动器会逐条发送指令并等待控制器完成操作。对于运动指令而言,这意味着会出现微小延迟(会有明显顿挫)。
Tip:在大多数情况下,离线编程是控制机器人的最佳方式,因为所有运动指令都预先被机器人控制器知晓(预读),使其能够充分利用运动和速度优化功能,例如路径圆滑处理。
Tip:可采用后处理器与驱动器的混合方案,将复杂路径上传至控制器后通过驱动器远程调用。这种方式在使用RoboDK API时尤为高效。