创建工作站
按以下步骤准备离线测试程序:
1.选择机器人:
a.选择文件➔ 打开机器人库。此时会出现一个窗口,显示机器人列表。
b.(可选)然后你通过筛选器查找你需要的机器人。
c.找到机器人并选择下载。
或者,选择文件➔ 打开,然后选择计算机中的机器人文件。该文件可从网站下载https://robodk.com.cn/cn/library或在机器人校准项目后获得。
2.添加测试模块:
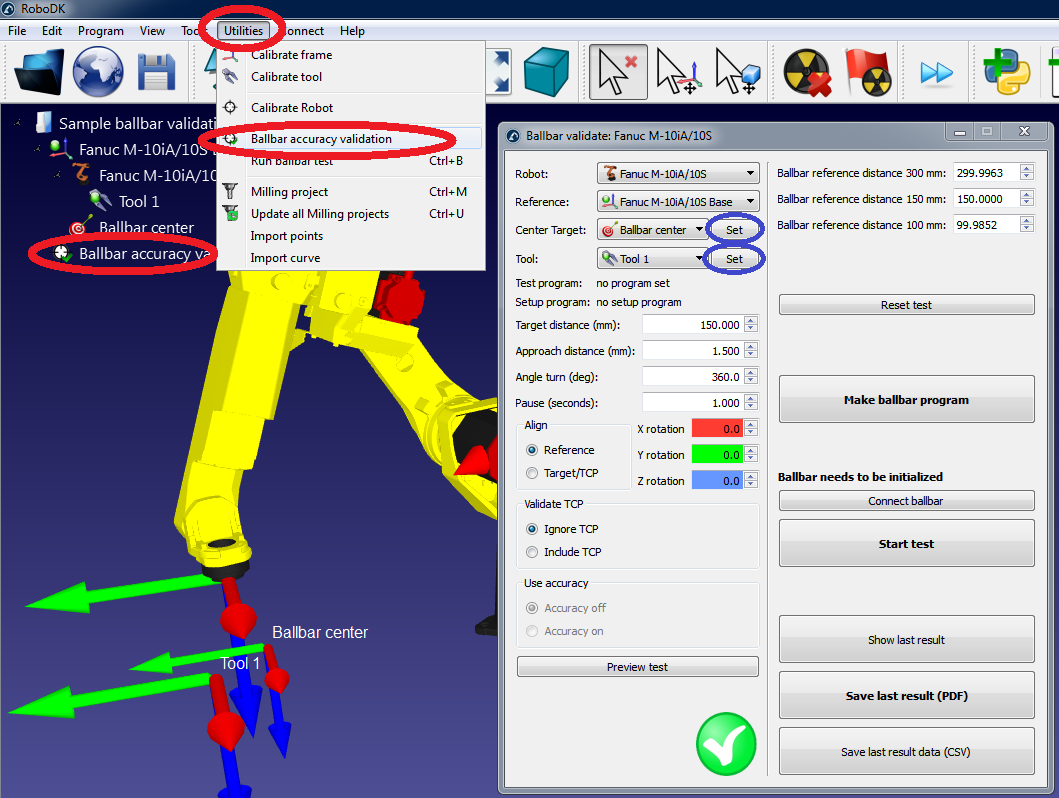
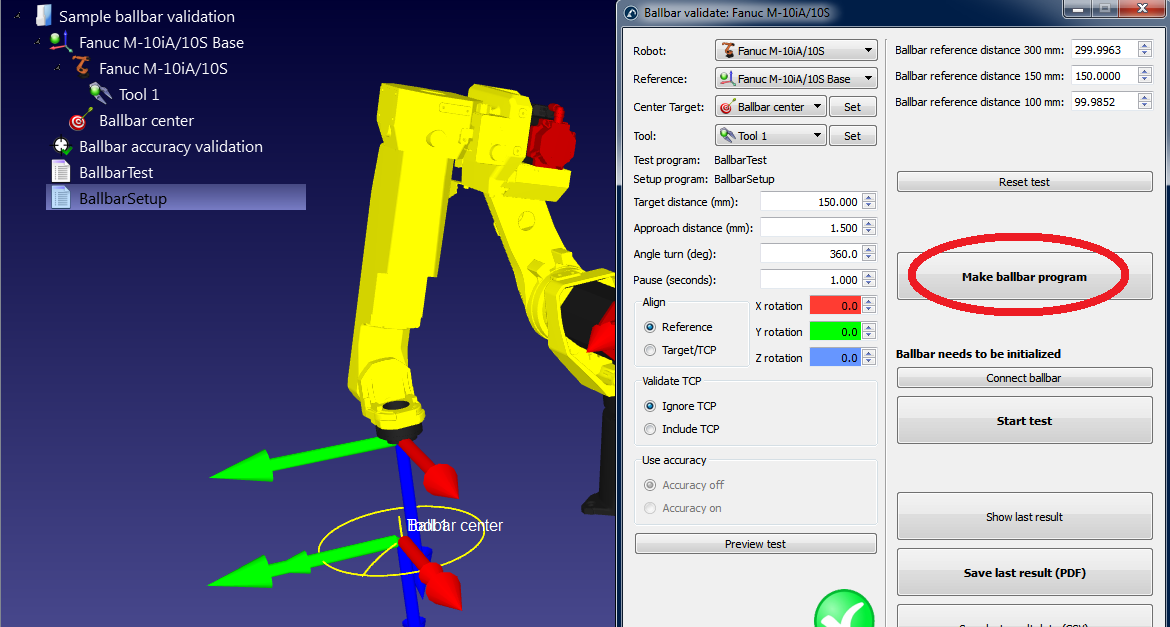
a.选择:实用程序➔ 球杆仪精度测试
b.将出现以下窗口,并自动创建目标球杆仪中心。如果机器人没有 TCP,TCP 工具 1 也将自动创建。
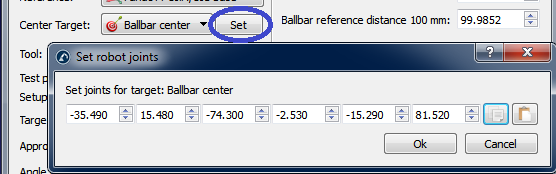
3.输入目标球杆仪中心的机器人关节数值:
a.选择中心目标点,球杆仪中心旁边的 "设置"。
b.输入机器人关节(关节轴 1 至 6)。
c.选择确定。
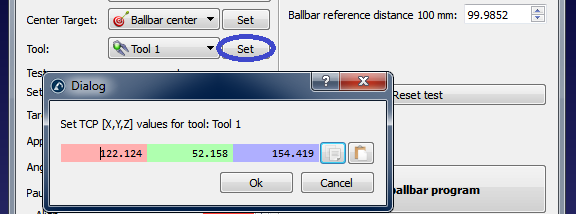
4.输入 TCP 坐标:
a.选择所选工具(本例中为Tool 1)旁边的设置
b.输入 TCP 的 X、Y、Z 坐标(相对于机器人末端效应器)
c.选择确定
5.生成测试程序:
a.选择 "创建球杆仪程序",程序将被创建。实际上,会出现两个程序:
i.球杆仪设置:该程序用于将中心工具杯支点(圆心)置于先前定位的相同位置
ii.球杆仪测试:该程序用于围绕支点(圆心)画圆,以便使用球杆仪采集数据
b.双击新生成的程序。RoboDK 将模拟机器人运行程序。
如果默认设置下的球杆仪测试不可行,可以更改测试参数。请参阅下一节了解如何更改这些设置。
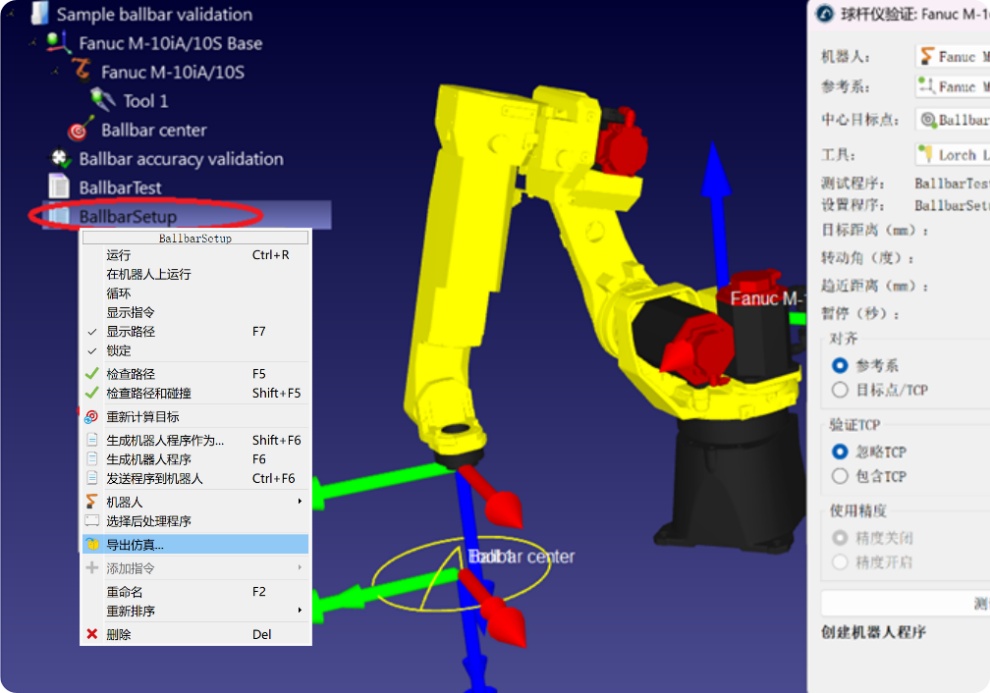
6.生成可执行程序:
a.右键单击BallbarTest 程序。
b.选择生成机器人程序
c.对BallbarSetup 程序重复上述步骤(按 F6 键可在桌面上自动生成所有程序)。
d.然后可将程序保存在 USB 盘中并传输到机器人上。大多数机器人也可使用 FTP 连接。
Important:发那科机器人需转换二进制程序(TP格式)。RoboDK会自动从LS格式文件转换,但要求:Roboguide软件安装在默认路径。或手动指定WinOLP工具目录(工具→选项→其他),更多信息请参阅发那科(Fanuc)章节。
7.最后,选择文件➔ 保存工作站,将 RoboDK 工作站保存为一个文件。双击该文件(rdk 格式),即可在 RoboDK 中恢复该项目。