球杆仪报告
当球杆仪测试完成后,将生成PDF格式的测试报告(如下图所示):
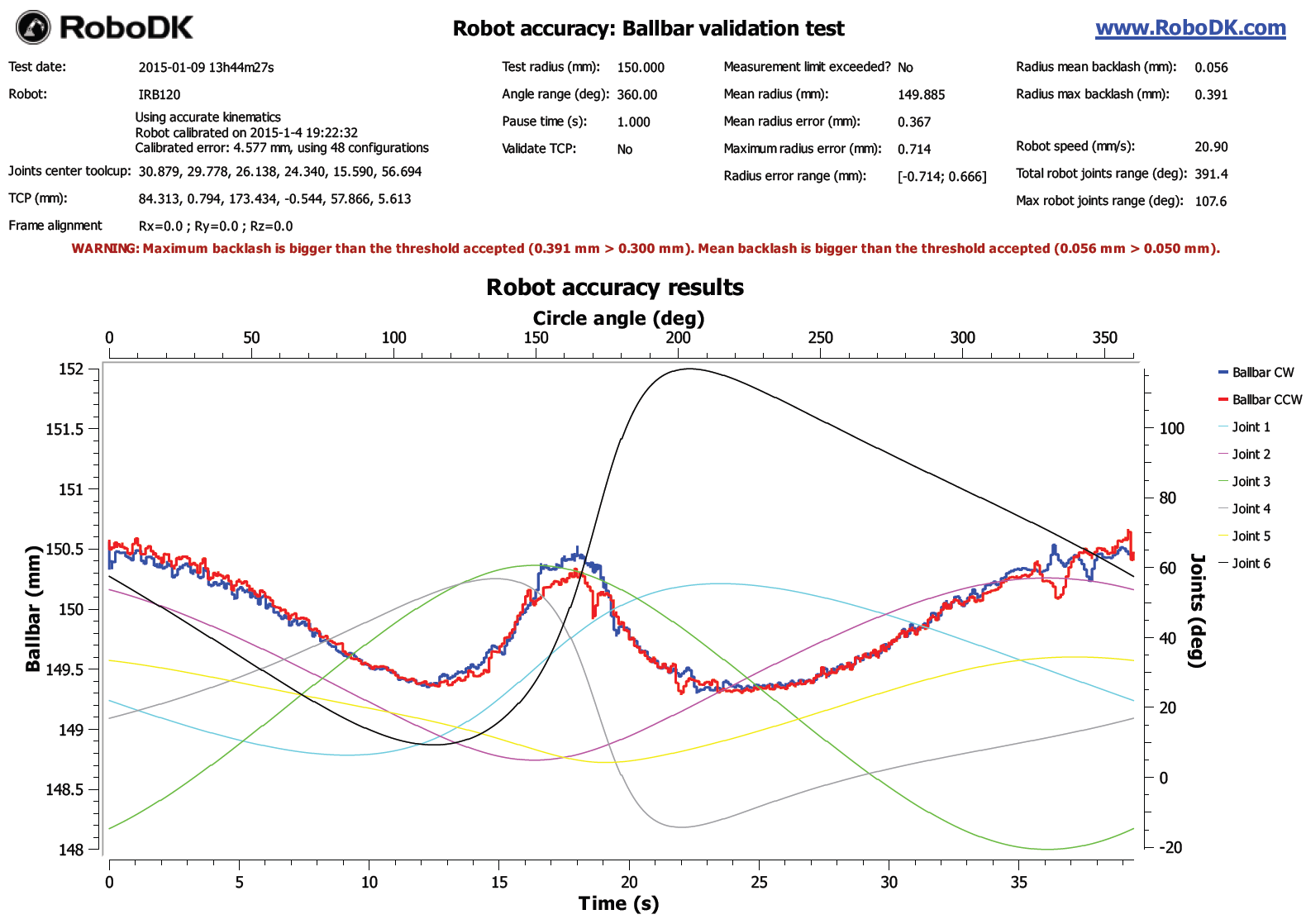
该报告以毫米为单位显示球杆仪读数(左侧Y轴),分别对应顺时针和逆时针运动轨迹(蓝线和红线),时间轴以秒为单位显示在底部X轴。同时还会显示机器人关节数据。关节角度以度数为单位(右侧Y轴),相对于圆周角度进行显示(360度表示完整回转)。当对应关节运动方向改变时,若存在故障电机会导致测量值出现显著变化,从而产生明显的反向间隙。
如果反向间隙超过设定阈值,报告将向用户发出警告。该阈值可在菜单栏的"工具➔选项➔精度"选项卡中进行设置。
附件- 蓝牙连接#BallbarBluetooth
本节说明如何在计算机和球杆仪之间建立蓝牙连接。要使通信正常工作,我们必须首先使用Windows系统建立计算机与球杆仪设备之间的通信。
必须激活"Windows蓝牙协议栈"(Windows默认蓝牙管理器)。然后按照以下步骤建立首次连接:
1.点击Windows开始按钮
2.选择控制面板
3.搜索关键词"蓝牙"
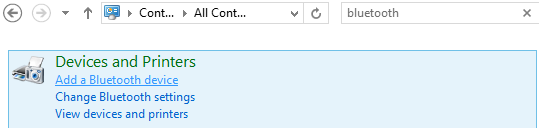
4.选择蓝牙设备
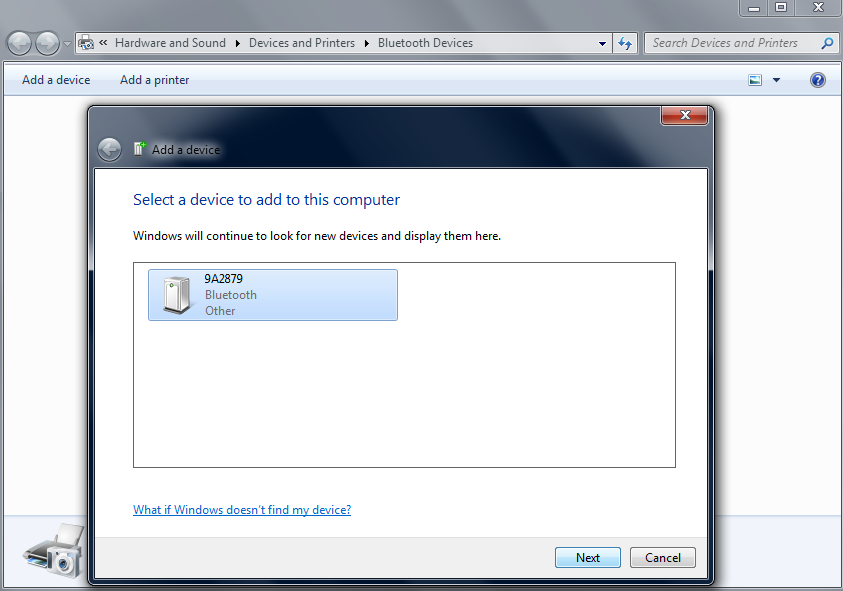
5.如果未看到球杆仪设备,选择"添加设备"
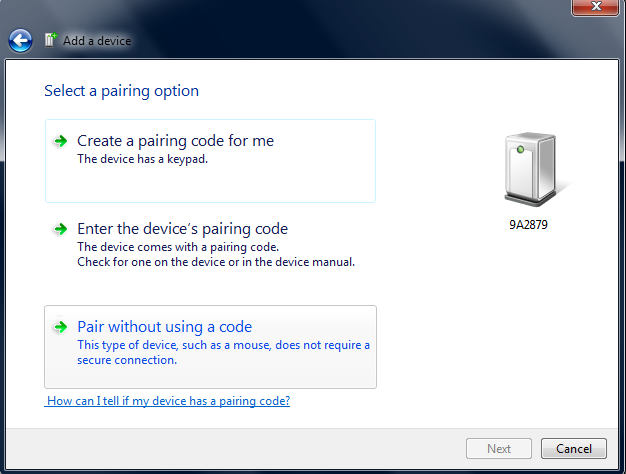
6.当设备出现后选择它并点击"下一步"。显示的数字是球杆仪序列号,该号码也打印在设备上
7.最后选择"不使用配对码配对"
蓝牙设备现在可以通过 RoboDK 进行测量了。
现在蓝牙设备已准备就绪,可通过RoboDK进行测量。如果使用某些笔记本电脑集成的蓝牙适配器(即使是新近的电脑),蓝牙连接可能会非常受限。因此建议购买外置蓝牙适配器以确保连接稳定可靠。
计算机不应距离球杆仪设备太远。如果出现连接问题,建议为蓝牙适配器使用USB延长线。