离线设置
我们建议在RoboDK中构建实体环境的虚拟场景(离线设置),预先规划测试路径和位置。仅需安装RoboDK的电脑即可操作,无需实际机器人和跟踪仪。可从以下目录下载RoboDK校准与路径验证设置案例:
https://robodk.com.cn/cn/stations#filter?feature=calibration-project
RoboDK提供按ISO9283标准生成构型与推荐路径的实用工具。操作流程:
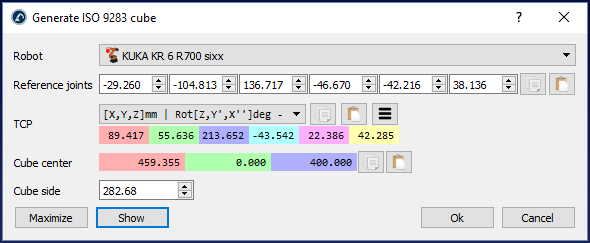
1.菜单栏中选择:实用程序➔创建ISO 9283 立方体(目标点和路径)
2.输入参考关节变量(工具相对于追踪仪的机器人位置)
3.调整立方体位置与尺寸
4.点击确定
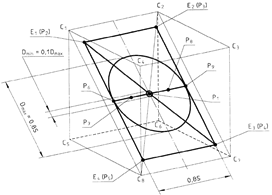
这将创建ISO标准描述的5个目标点及轨迹精度测试推荐路径。这些目标点和路径位于机器人前方的立方体内。可自定义立方体边长,移动中心点:ISO p1目标,以及定义路径方向的参考关节参数。还可最大化立方体尺寸以适配机器人工作空间。
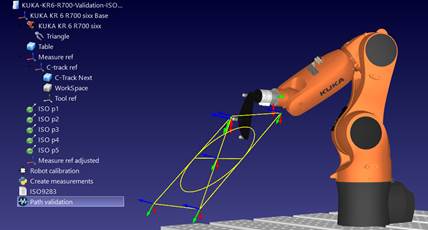
下图展示包含机器人校准与验证选项的示例工作站: