路径精度
进行路径精度测试需要RoboDK创建的机器人程序,比如根据创建ISO 9283 立方体(目标点和路径)选项生成的ISO9283程序。选择程序后按F6(或选择:程序➔生成程序)可导出厂商专用机器人程序。也可使用RoboDK创建的其他程序(如直线、圆弧或方形路径)。
还需配备能追踪末端执行器位置、并提供基于参考坐标系位置数据的测量系统。必须在RoboDK中完成基座设置和工具设置流程(校准时必需)以确定机器人基坐标系和工具坐标系。
测量数据需在机器人沿程序运动时采集。应使用测量系统厂商提供的默认软件进行连续记录,并以CSV或TXT格式导出。文件需包含XYZ位置数据及每个测量的时间戳,可选包含工具相对于机器人基座的姿态数据。
Note:建议尽可能快地进行测量,并且不要进行任何类型的过滤。
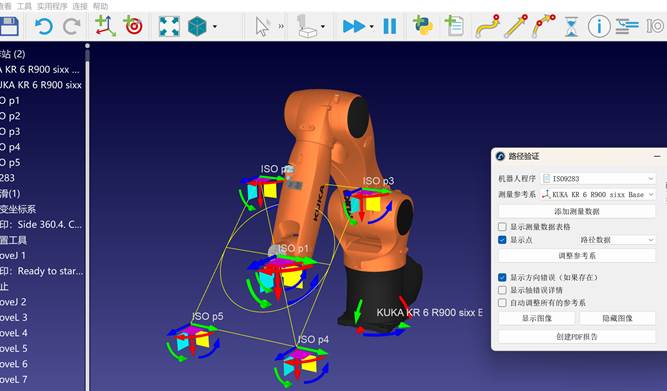
在RoboDK中启动路径验证程序:
1.菜单栏中选择:实用程序➔测试路径精度(ISO 9283)
2.从下拉菜单选择验证用程序
3.指定测量使用的参考坐标系
4.点击添加测量数据导入数据。也可将含测量数据的CSV/TXT文件拖放至轨迹验证窗口
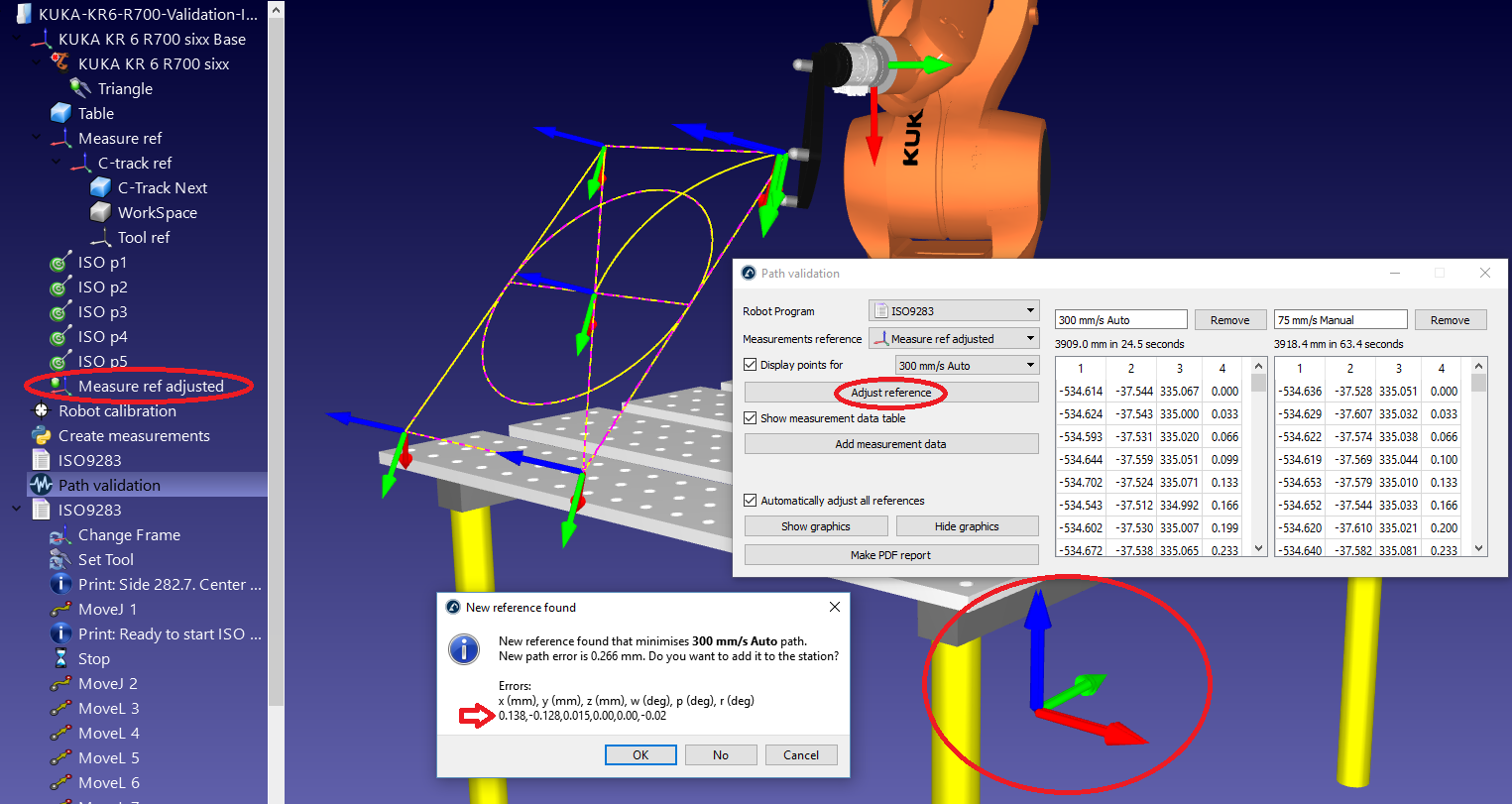
最后点击:创建PDF报告,创建包含轨迹精度、速度及加速度统计图表的PDF文档。可在不同条件(速度、转角精度值、负载等)下重复测试,在同一报告中对比这些参数。
测量点显示为紫色,应与机器人理想运动轨迹(黄色路径)吻合。RoboDK提供的统计数据即这两条路径的偏差。
若参考坐标系定义不当,测量点将与黄线不重合。可能原因包括参考坐标系定义错误或工具定义不一致。此时点击调整参考系可对两条路径进行最佳拟合,使统计数据排除这些错位影响。