测试结果
完成轨迹精度测试后,在轨迹验证窗口点击生成PDF报告即可获取PDF文档,内含轨迹精度、速度及加速度的统计图表。
前文示例测试的结果如下图所示。本案例中ISO9283程序以两种模式运行:
●手动模式-75毫米/秒
●自动模式-300毫米/秒
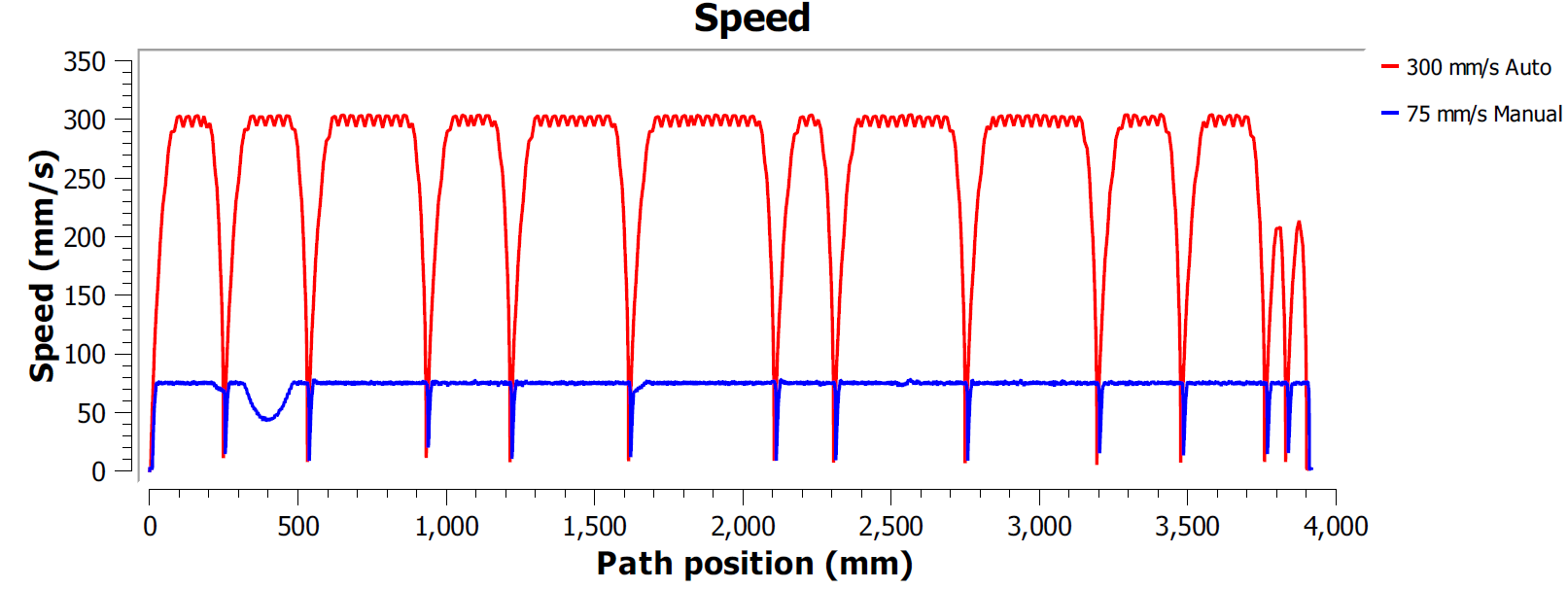
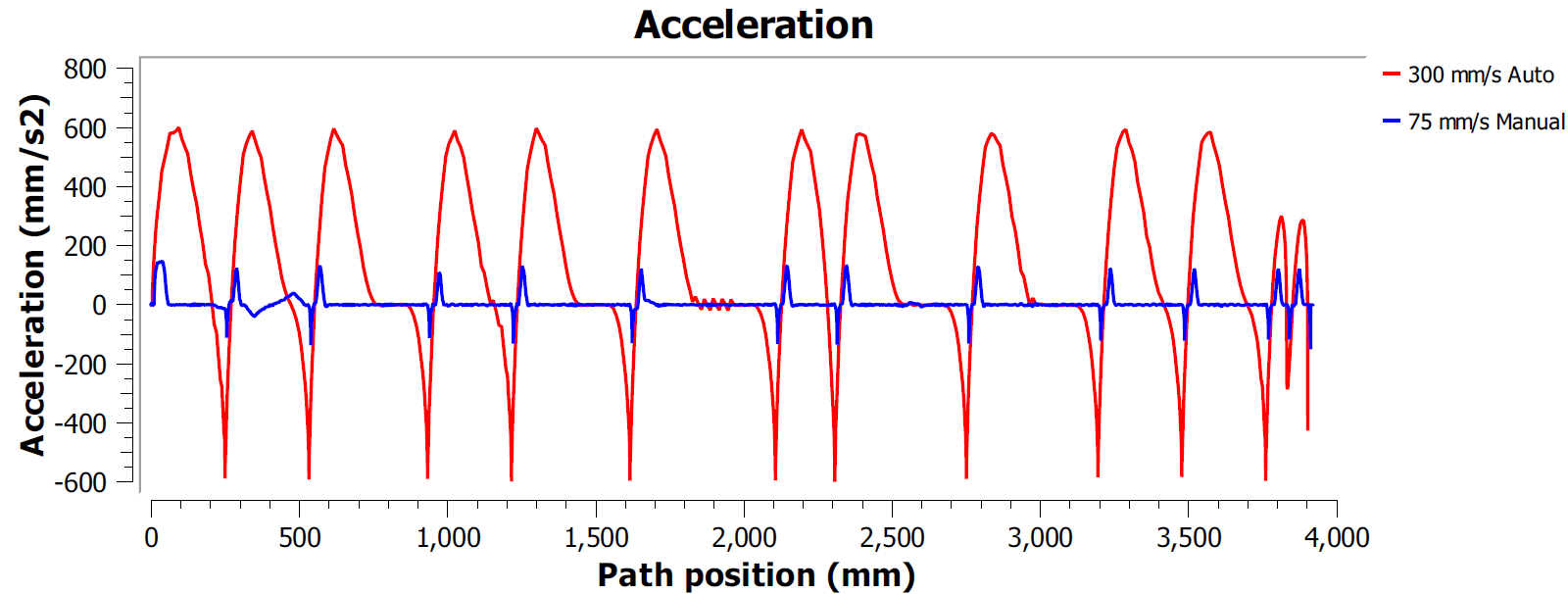
本案例两个程序均采用精细精度模式生成,意味着机器人将在每个点停顿以确保路径绝对精确。此时通常会观察到路径上的高加速度和减速度,因为每段直线或圆弧运动(转角处)末端速度必须归零。
多数机器人品牌提供圆滑过渡选项来消除这种效应。例如ABB的ZoneData可指定允许控制器平滑转角的精度区域,发那科的CNT参数可设置与速度成比例的平滑百分比,库卡的$ADVANCE指令配合C_DIS标志,优傲机器人则允许指定混合半径来平滑转角。
因此轨迹精度测试有助于在保持运动流畅性与路径转角处可接受精度水平之间找到最佳平衡点。
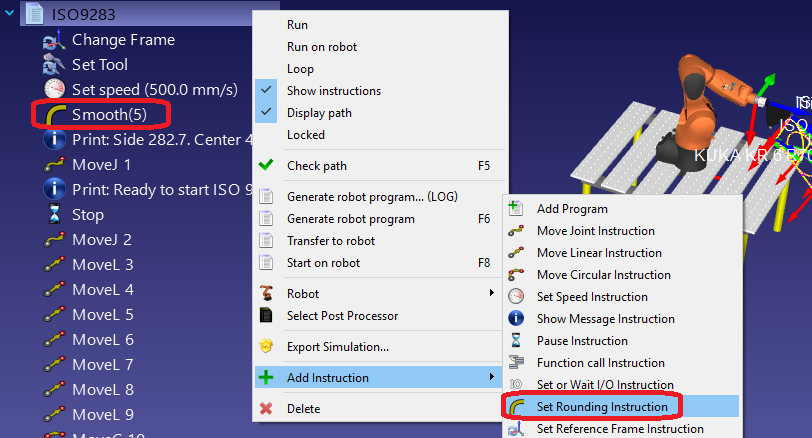
在RoboDK中可设置圆滑参数及程序速度。编辑测试程序的步骤:
1.右键点击程序
2.选择显示指令
3.选择第1条或第2条指令
4.点击程序➔设置轨迹精度
5.点击程序➔设置速度指令