ISO9283
国际标准"ISO9283:操作工业机器人-性能标准及相关测试方法"规定了评估工业机器人性能的测试方法。该标准特别提供了正确测量机器人位置精度、重复精度和轨迹精度的操作流程。
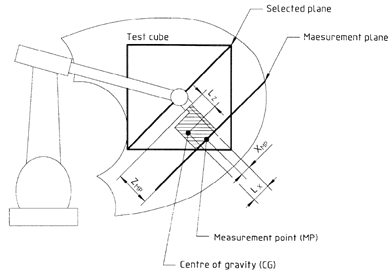
根据ISO9283标准,所有测试都应在所谓的ISO测试立方体内进行。该立方体应能容纳在机器人工作空间内的最大体积。此外,位置精度和重复精度需在五种不同构型下各测量30次。众所周知,对于现代机器人而言,5种构型不足以提供充分的精度测量。
多数机器人制造商仅提供校准后的位置精度数据,且通常使用至少100种不同构型来获取准确的位置精度统计。工业机器人具有高度可重复性但精度不足,因此需要通过校准来提高精度。
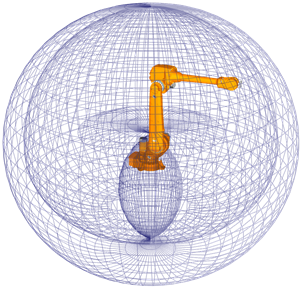
80 年代典型的机器人工作区 现代机器人的工作区
然而即使未经校准,ISO9283标准仍常用于重复精度和轨迹精度测试。

建议观看以下展示RoboDK轨迹精度测试的视频:https://youtu.be/yMQjqAQY1iE。
RoboDK还可用于校准机器人,以及测试校准前后机器人的性能。最后,RoboDK 还可用于通过球杆仪测试校准前后机器人的精度。